CS1171 Hand-Held Programmer User's Manual
Control Solutions LLC Page 22 of 56
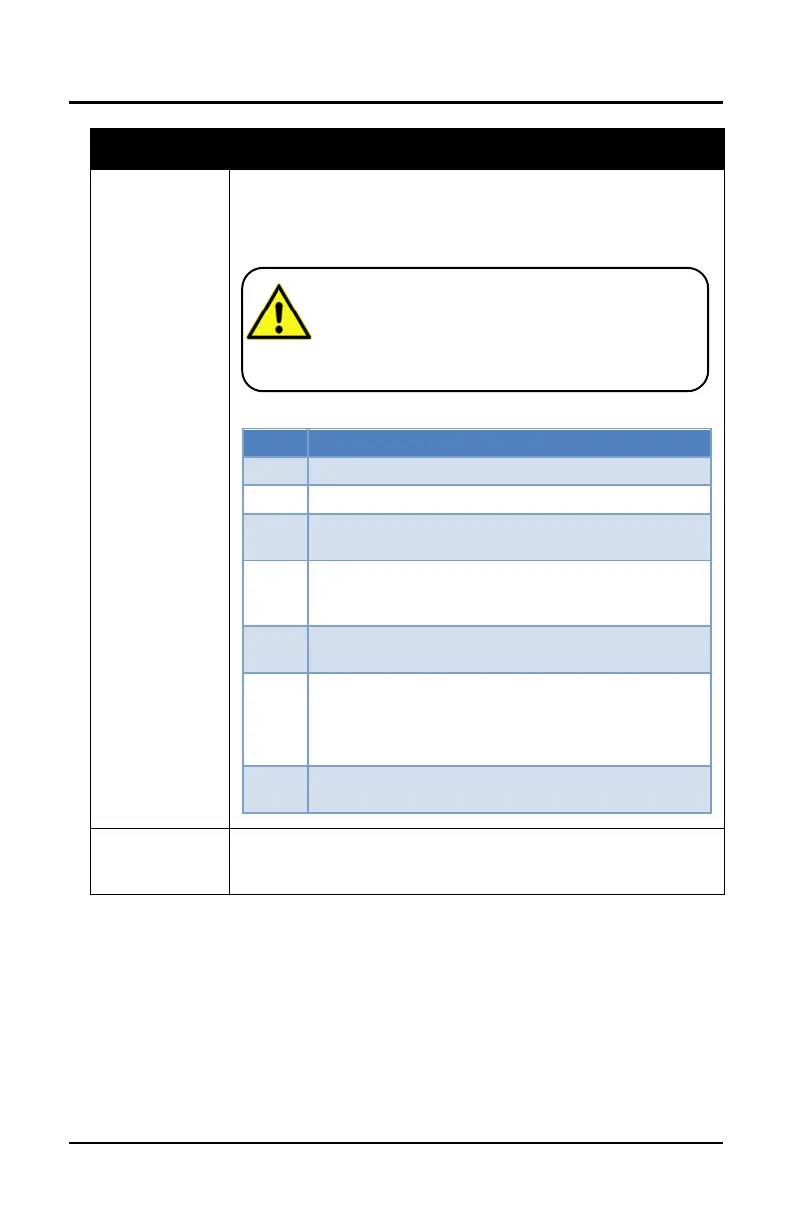
Sets the motor compensation which is the calibration value used to
compensate speed control for varying terrain, also known as
Power On Demand (POD). Set to 0 for no speed control
compensation.
To calibrate:
Drive at full throttle on flat terrain and measure
vehicle speed
Drive at full throttle on a moderate incline and
increase the Motor comp until the vehicle’s speed
matches the speed measurement in step 3
Verify that PWM is not 100% (monitor PWM in the
Debug menu)
Is PWM is 100%?
If yes, reduce FWD speed and continue with
step 3
If no, continue with the next step
Reduce the Motor comp value by 20% to allow for
temperature tolerance of the motor and controller
See Indoor Mode Sub-Menu on page 29.
Indoor Mode is also referred to as Drive Mode 2.
Setting this parameter too high can result in an over
compensated drive motor that may behave erratically.
Please seek advice from your manufacturer or dealer
before attempting to calibrate this parameter. This
feature should typically only be used by the
manufacturer.