Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Menu 0
Running
the motor
Optimisation Macros
Advanced
Parameters
Technical
Data
Diagnostics
UL Listing
Information
168 Unidrive User Guide
www.controltechniques.com Issue Number: 9
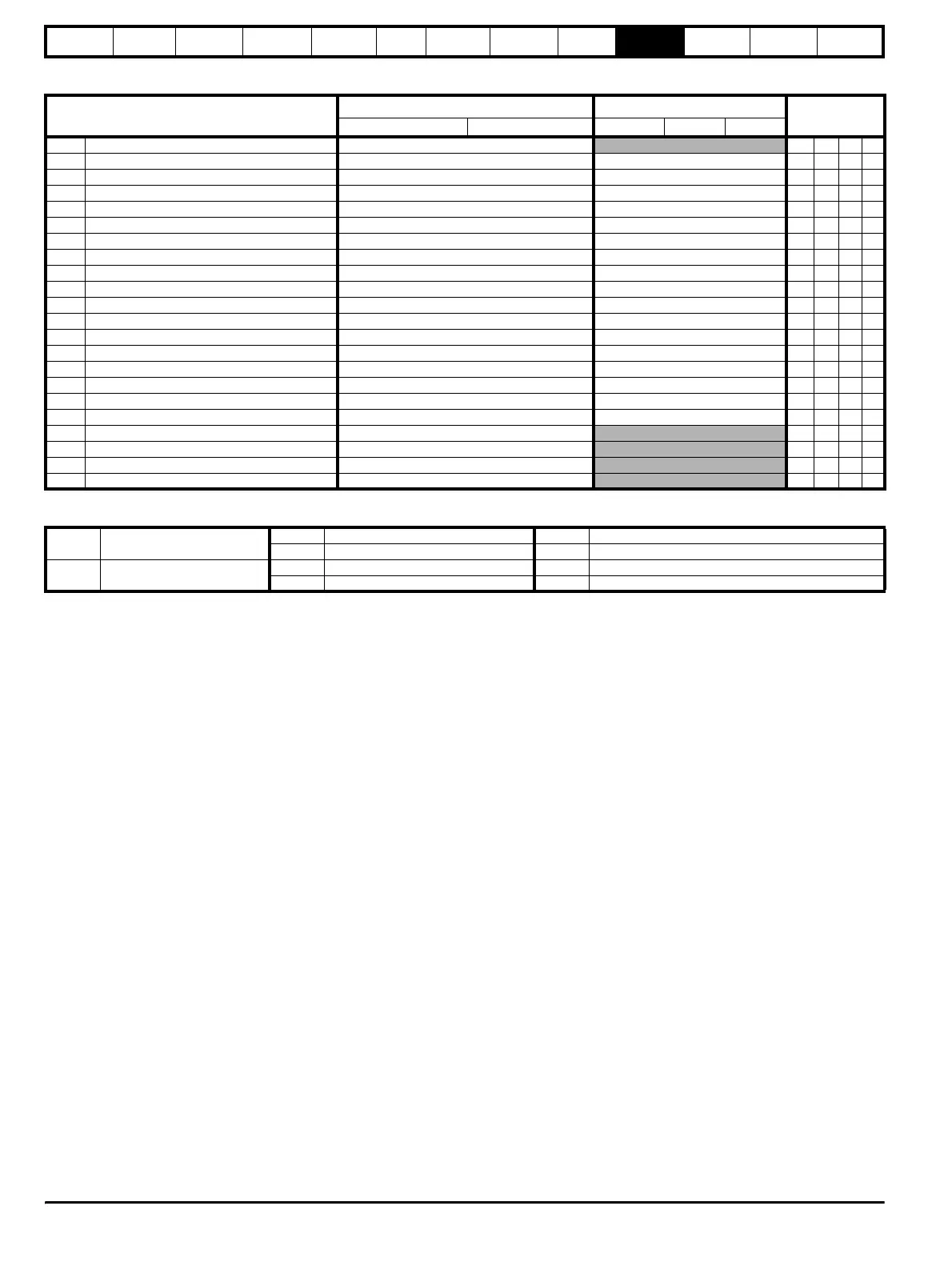
Parameter
Range(
Ú)Default(Ö)
Type
OL CL OL VT SV
14.01
PID controller output ±100.0 % RO Bi P
14.02 Main reference source parameter Pr 0.00 to Pr 20.50 Pr 0.00 RW Uni P
14.03 PID reference source parameter Pr 0.00 to Pr 20.50 Pr 0.00 RW Uni P
14.04 PID feedback source parameter Pr 0.00 to Pr 20.50 Pr 0.00 RW Uni P
14.05 PID reference invert 0 or 1 0 RW Bit
14.06 PID feedback source invert 0 or 1 0 RW Bit
14.07 PID reference slew-rate limit 0 to 3,200.0 s 0 RW Uni
14.08 PID enable 0 or 1 0 RW Bit
14.09 Optional PID-enable source parameter Pr 0.00 to Pr 20.50 Pr 0.00 RW Uni P
14.10 PID proportional gain 0 to 4.000 1 RW Uni
14.11 PID integral gain 0 to 4.000 0.5 RW Uni
14.12 PID derivative gain 0 to 4.000 0 RW Uni
14.13 PID output high limit 0 to 100.0% 100 RW Uni
14.14 PID output low limit ±100.0 % -100 RW Bi
14.15 PID output scale factor 0 to 4.000 1 RW Uni
14.16 PID output destination parameter Pr 0.00 to Pr 20.50 Pr 0.00 RW Uni R P
14.17 PID hold integrator enable 0 or 1 0 RW Bit
14.18 PID symmetrical limits enable 0 or 1 0 RW Bit
14.19 PID main reference ±100.0 % RO Bi P
14.20 PID reference ±100.0 % RO Bi P
14.21 PID feedback ±100.0 % RO Bi P
14.22 PID error ±100.0 % RO Bi P
RO Read Only parameter
Uni Unipolar variable parameter R Reset required for new value to take effect
Bi Bipolar variable parameter S New parameter-value saved at power-down
RW Read / Write parameter
Txt Text variable parameter P Protected; forbidden as destination parameter
Bit Bit parameter FLC Full-load current (max. continuous), Pr
11.32 {0.33}