Chapter 7 Servo Parameters|ASDA-A&A+ Series
Revision April 2009 7-37
P1 - 29
PO8H 8th Position Command for Rotation Communication Addr.: 011DH
Default: 0 Related Section:
Applicable Control Mode: Pr Section 6.2.2
Unit: rev
Range: -30000 ~ +30000
Settings:
This parameter is used to set rotation cycle number of internal position 8.
P1 - 30
PO8L 8th Position Command for Pulse Communication Addr.: 011EH
Default: 0 Related Section:
Applicable Control Mode: Pr Section 6.2.2
Unit: pulse
Range: +/-max. cnt/rev
Settings:
This parameter is used to set rotation pulse number of internal position 8.
Stroke8 = PO8H × (cnt/rev) + PO8L
P1 - 31
Reserved
P1 - 32
LSTP Motor Stop Mode Selection Communication Addr.: 0120H
Default: 0 Related Section: N/A
Applicable Control Mode: ALL
Unit: N/A
Range: 0 ~ 11
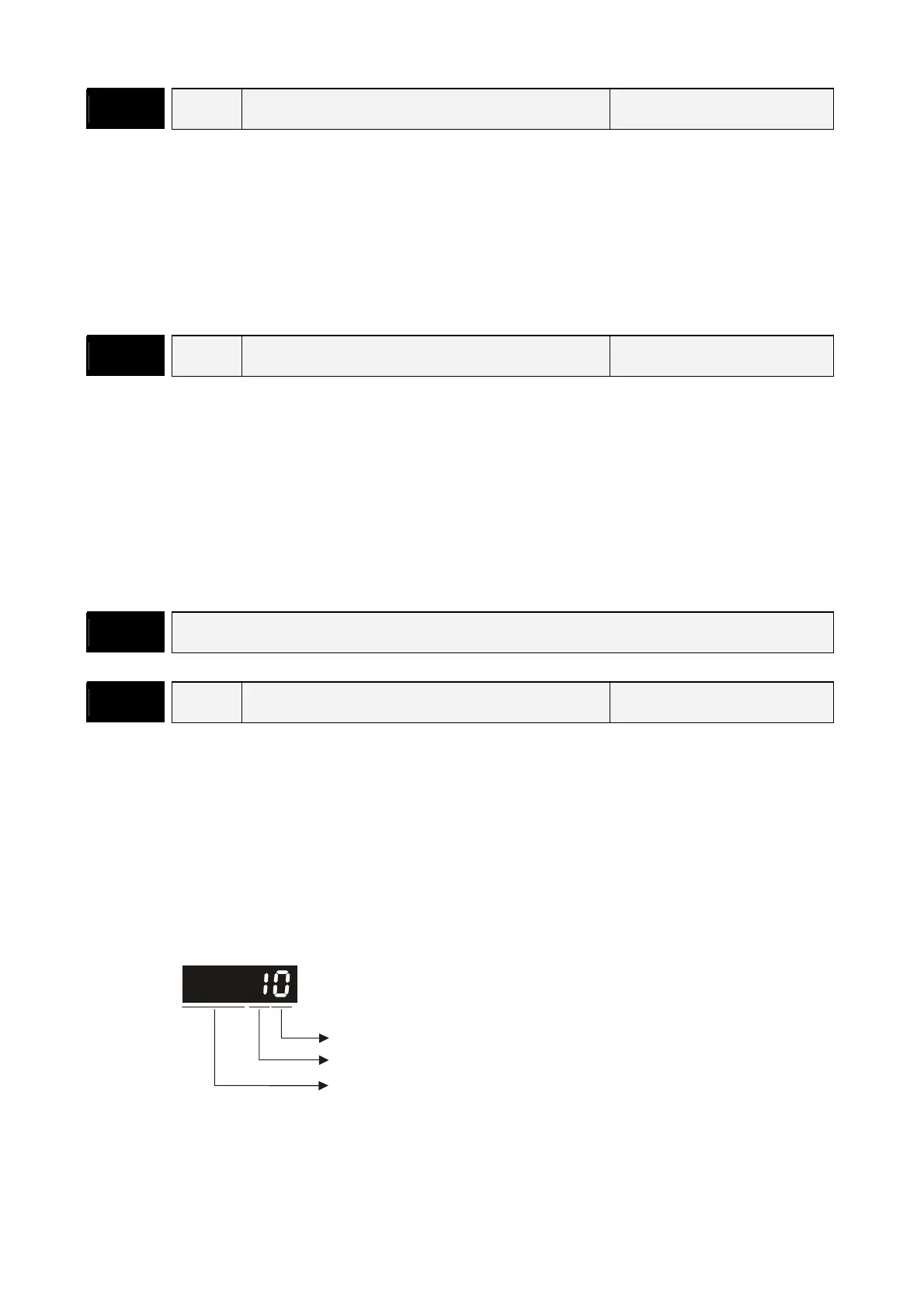
Settings:
This parameter is used to select servo motor stop mode.
When a fault (servo alarm) occurs (except for CWL, CCWL, EMGS and serial communication
error), it is used to set servo motor stop mode.
not used
B
• A=0: Stop instantly
• A=1: Decelerate to stop
• B=0: Use dynamic brake when Servo Off (when the
servo drive is Off).
• B=1:
llow servo motor to coast to stop when Servo
Off (when the servo drive is Off).
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales