Chapter 7 Parameters ASDA-B2
7-76 Revision May, 2018
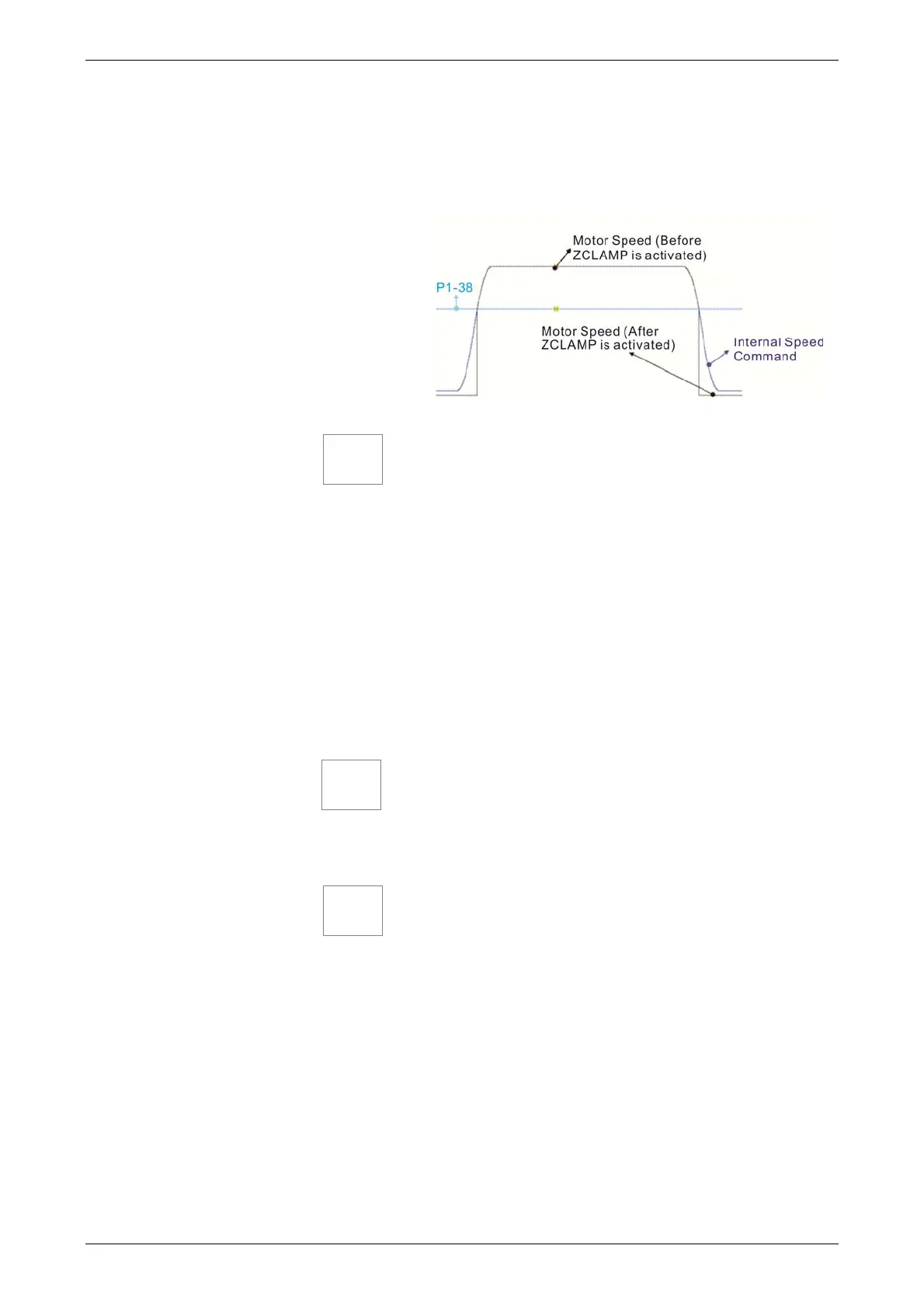
Bit10 = 1: The command source is register. ZCLAMP
function will use the register with acceleration /
deceleration processing to judge if this function is
enabled. When ZCLAMP conditions are
established, the motor speed will be set to 0.
Bit11: Pulse inhibit funciton
Bit11
Bit11 = 0: Disable NL / PL pulse input inhibit function. In PT
mode, the external position pulse command will be
input into the servo drive in any condition.
Bit11 = 1: Enable NL / PL pulse input inhibit function. In PT
mode, if NL exists, the external NL pulse will be
inhibited to input to the servo. PL pulse input will be
accepted. In PT mode, if PL exists, the external PL
pulse will be inhibited to input to the servo. NL
pulse will be accepted.
Please note: In PT mode, if NL and PL both exist, both of
them will be inhibited to input to the servo.
Bit12: Lack phase detection
Bit12
Bit12 = 0: Enable lack phase (AL022) detection
Bit12 = 1: Disable lack phase (AL022) detection
Bit13: Encoder output error detection function
Bit13
Bit13 = 0: Enable encoder output error (AL018) detection
function
Bit13 = 1: Disable encoder output error (AL018) detection
function
 Loading...
Loading...


