ASDA-M Chapter 7 Motion Control
Revision December, 2014
7-27
DEC1/DEC2: The first / second deceleration time
DLY: Delay time
BOOT: Activation mode. When the POWER is ON:
0: will not do homing
1: start homing (Servo ON for the first time)
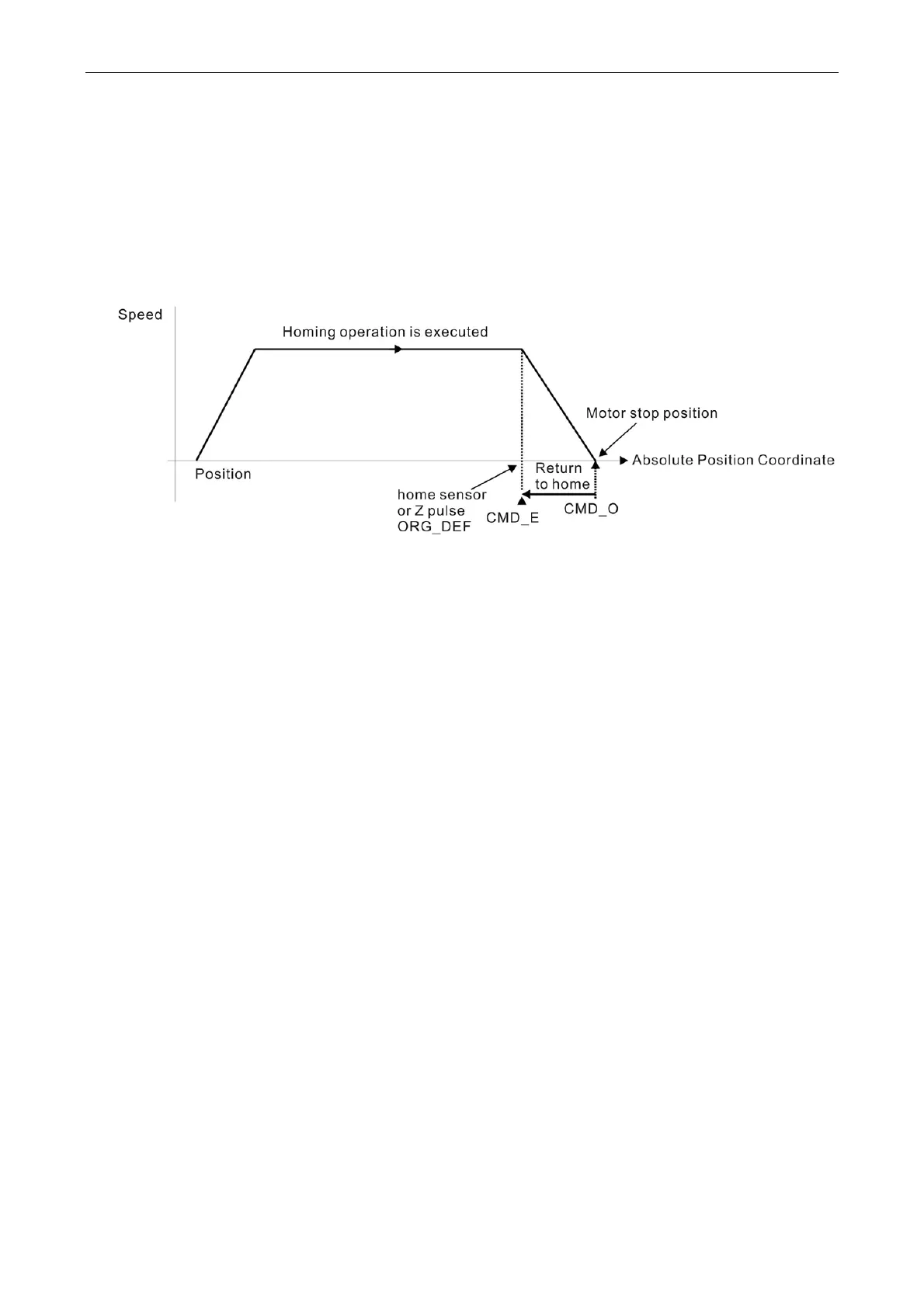
ORG_DEF: the coordinate value of the origin definition which might not be 0
A. If the motor moves to the origin after completing homing
After finding the origin (Sensor or Z), the motor has to decelerate to stop. The stop
position will slightly exceed the origin:
If the motor moves to the origin, then set PATH to the PR with absolute position
command and set the DATA of the PR to ORG_DEF.
CMD_O: Command Output Position
CMD_E: Command End Position
B. Homing does not define the offset value but uses PATH to specify a path as the offset
value.
After finding the origin, if the user desires to move a short distance of offset S (the
related home Sensor or Z) and set the coordinate to P after moving:
Then do not set PATH to 0, but set ORG_DEF to P-S and the PR absolute position
command to P (set incremental position command to S will do as well)
 Loading...
Loading...