5 PROFINET Communication Profile
1. Synchronous parameter access in Delta-specific mode
2. Asynchronous parameter access
3. Identification & Maintenance functions (I&M)
4. Disconnection Treatment
5.1 Synchronous Parameter Access in Delta-specific Mode (Tables for
Control Word and Status Word)
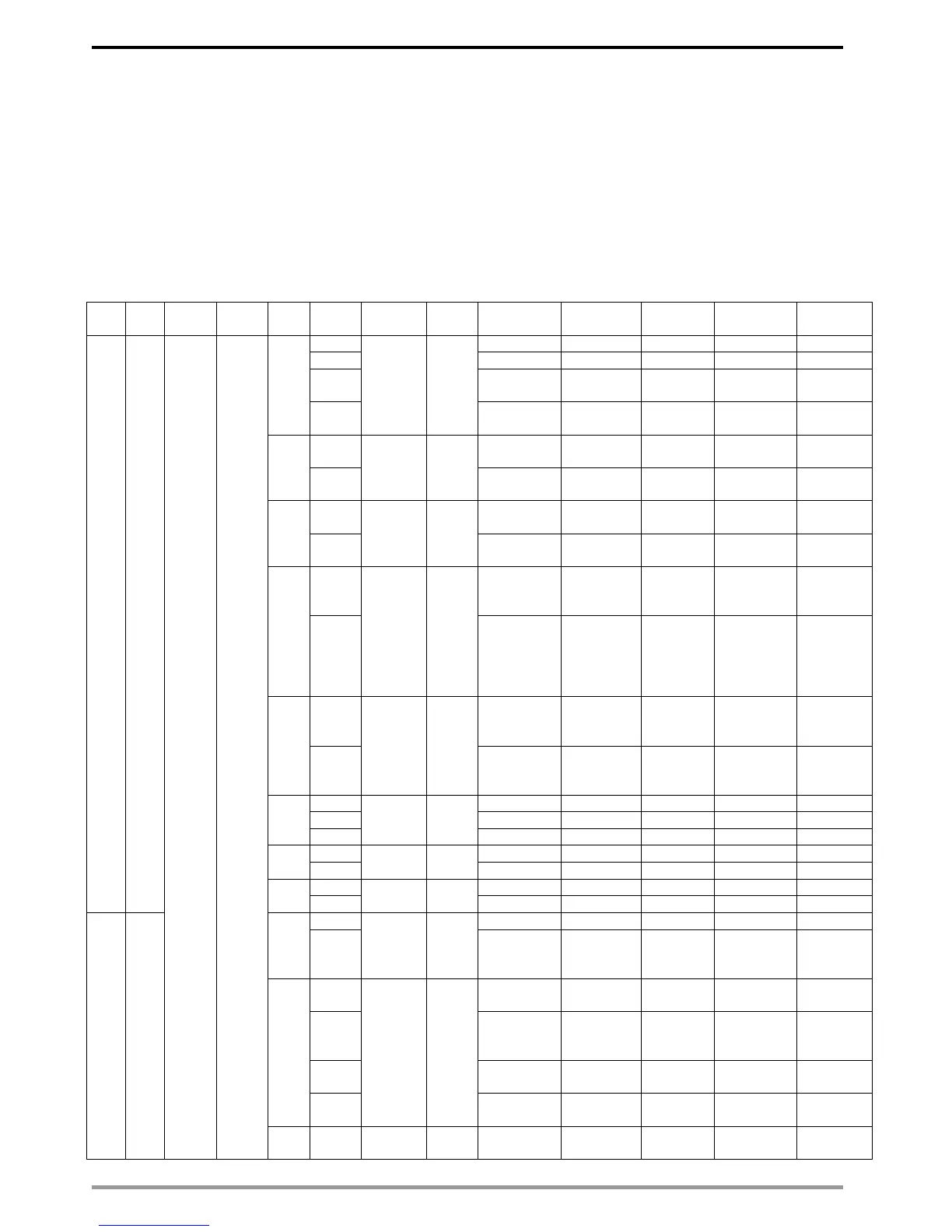
Table 1: 60xx Output Message (Host ControllerDrive) (Pr.09-30=1)