Chapter 12 Description of Parameter SettingsMS300 (High Speed Model)
12-02-11
30: Output when frequency < Pr.02-34 (< 02-34)
31: Y-connection for the motor coil
△
32: -connection for the motor coil
33: Zero speed (actual output frequency)
34: Zero speed include stop (actual output frequency)
35: Error output selection 1 (Pr. 06-23)
36: Error output selection 2 (Pr. 06-24)
37: Error output selection 3 (Pr. 06-25)
38: Error output selection 4 (Pr. 06-26)
40: Speed attained (including Stop)
43: Motor actual speed output < Pr. 02-47
44: Low current output (Pr. 06-71 to Pr. 06-73)
45: UVW magnetic contactor ON / OFF switch
46: Master dEb signal output
50: Output for CANopen control
52: Output for communication card control
66: SO output logic A
67: Analog input level reached output
68: SO output logic B
73: Over torque 3
74: Over torque 4
This parameter is used to set the function of multi-function terminals.
Summary of function settings
(Take N.O. normally open contact for example, ON: contact is closed)
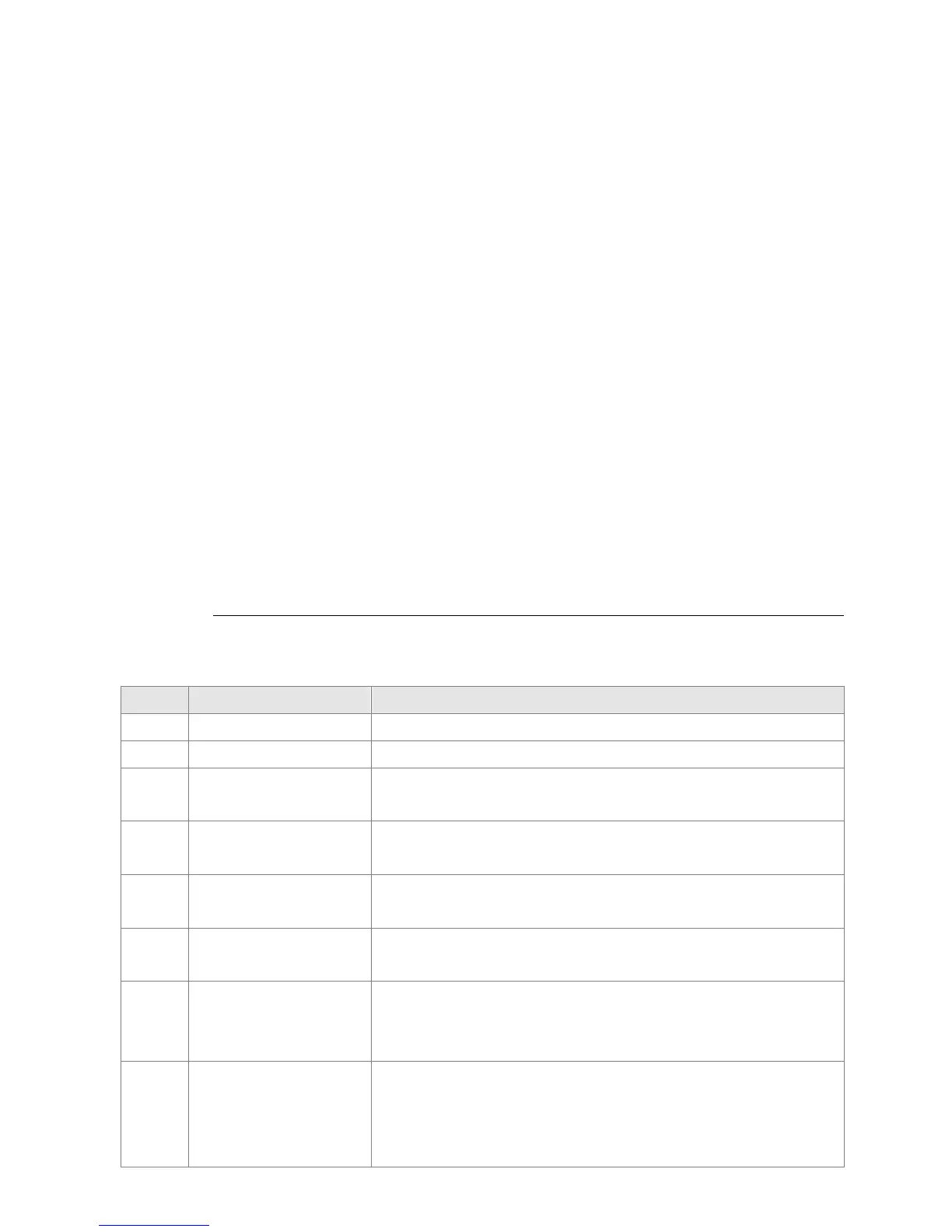
Settings Functions Descriptions
0 No Function Output terminal with no function
1 Indication during RUN Active when the drive is not at STOP.
2
Operating speed
attained
Active when output frequency of drive reaches to the setting
frequency.
3
Desired frequency
attained 1 (Pr. 02-22)
Active when the desired frequency (Pr. 02-22) is attained.
4
Desired frequency
attained 2 (Pr. 02-24)
Active when the desired frequency (Pr. 02-24) is attained.
5
Zero speed (frequency
command)
Active when frequency command = 0. (the drive must be at RUN
status)
6
Zero speed, include
STOP (frequency
command)
Active when frequency command = 0 or stops.
7 Over torque 1
Active when the drive detects over-torque. Pr. 06-07 is for setting
the over-torque detection level (motor 1), and Pr. 06-08 is for
setting over-torque detection time (motor 1).
Refer to Pr. 06-06~06-08.
 Loading...
Loading...



