原文取扱説明書
8.4 - PC5-A フォーマットt
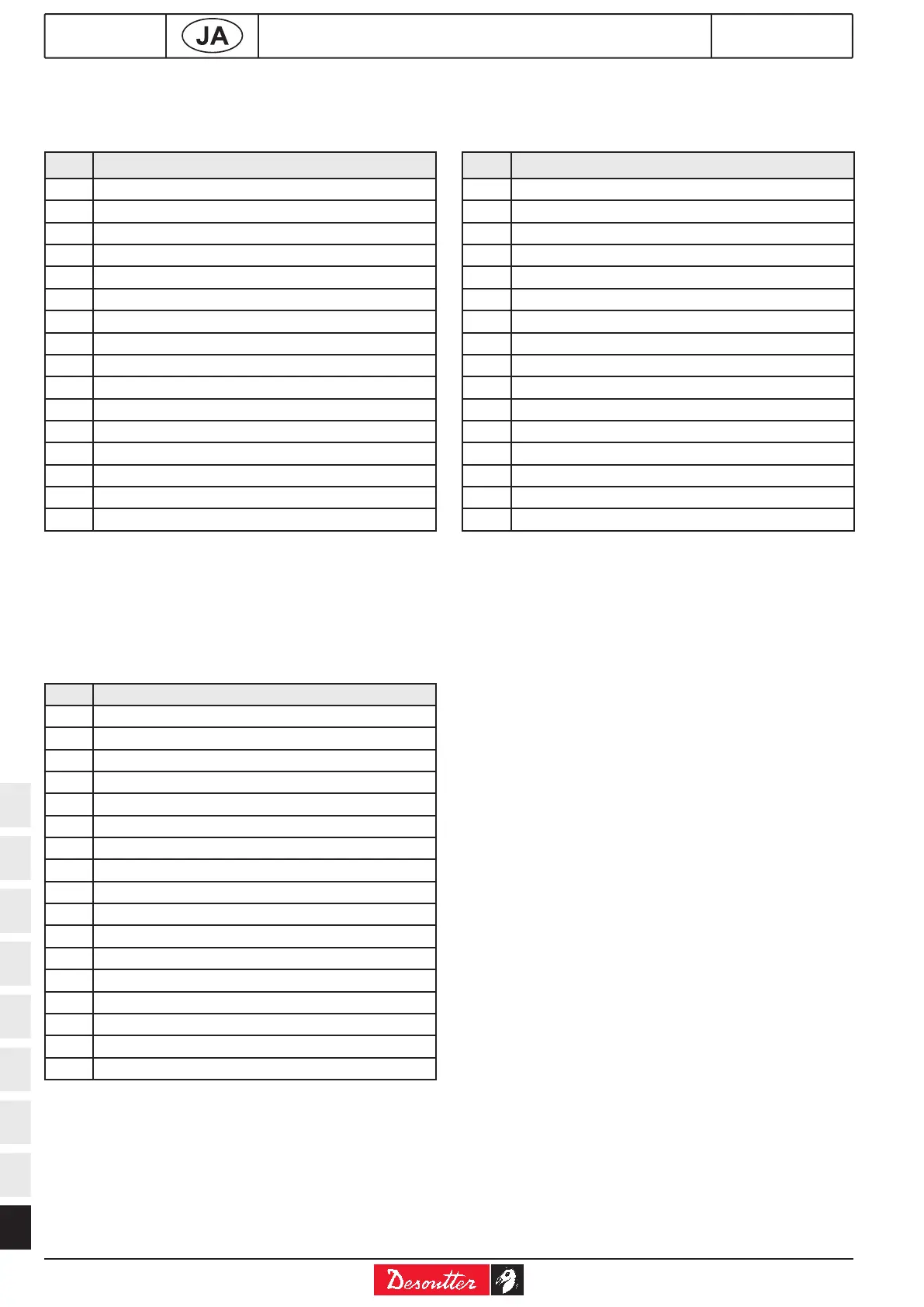
8.4.1 - スピンドルごとの報告: トルク率、トルク、
角度
文字 指定
F0 フレーム文字の開始
01
xx 報告(16進法で)
02
xx 00
03
xx AA 角度報告 (*)
04 TT トルク報告 (*)
xx TR、AA または TT =01(低報告の場合)
05 11 (受け入れ報告の場合)
xx 10 (高報告の場合)
06 サーボドライブフォルト
xx スピンドルが拒否グループに所属
07 サイクル開始ドロップ
xx サイクルがスピンドルを未終了
08 トランスデューサーフォルト
(*)2進法表記にて。
例:全スピンドルの受け入れ報告:
F0 01 3F 02 3F 03 3F 04 3F 05 3F 06 3F 07 3F 08
3F
8.4.2 - スピンドル 1 の読み取り結果
(スピンドルの数 x 回)
文字 指定
01 主軸の数
xx
xx 適用トルク (ASCII 表記)
xx 例:100.1 Nm
xx 30 31 30 30 31
xx
xx 角度 (ASCII 表記)
xx 例:40.0 °
xx 30 30 34 30 30
xx
xx
xx
xx
xx
xx
xx
FF フレーム文字の終了
8.5 - PC5-B フォーマット
8.5.1 - スピンドルごとの報告:トルク、角度、トル
ク率
文字 指定
F0 フレーム文字の開始
01
xx 報告(16進法で)
02
xx 00
03 TT トルク報告 (*)
xx AA 角度報告 (*)
04 TR トルク率報告 (*)
xx TR、AA または TT =01(低報告の場合)
05 11 (受け取り報告の場合)
xx 10 (高報告の場合)
06 サーボドライブフォルト
xx スピンドルが拒否グループに所属
07 サイクル開始ドロップ
xx サイクルがスピンドルを未終了
08 トランスデューサーフォルト
(*) 2進法表記にて
例: 全スピンドルの受け入れ報告:
F0 01 3F 02 3F 03 3F 04 3F 05 3F 06 3F 07 3F 08
3F

 Loading...
Loading...









