47
2 Mode de fonctionnement
FR
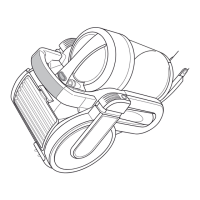
L'EVO détecte les obstacles se trouvant sur
son itinéraire de déplacement. Après le net-
toyage de l'ensemble d'une surface, il nettoie
encore une fois de manière ciblée (Ill. 6).
Grâce à sa logique intégrée et sa capacité
d'apprentissage qui en découle, il nettoie plus
rapidement et en consommant moins d'éner-
gie à mesure que passe le temps.
Si vous déclenchez l'appareil au cours du pro-
cessus de nettoyage, il perd toutefois le plan
virtuel de la zone à nettoyer qu'il s'est
construit. Lors du réenclenchment, il construit
à nouveau un autre plan virtuel.
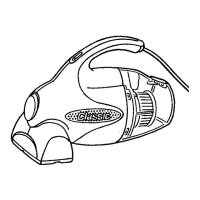
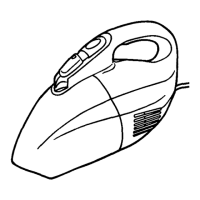
Votre appareil automatique de nettoyage des
sols reconnaît par lui-même les obstacles et
les différences de hauteur qui lui font face
(Ill. 7). Il ralentit sa progression devant des
obstacles. Aussi bien les surfaces placées
plus bas, par exemple les marches d'escalier,
que les surfaces placées à un niveau plus éle-
vé, par exemple les tapis, sont détectés et ne
seront pas nettoyés.
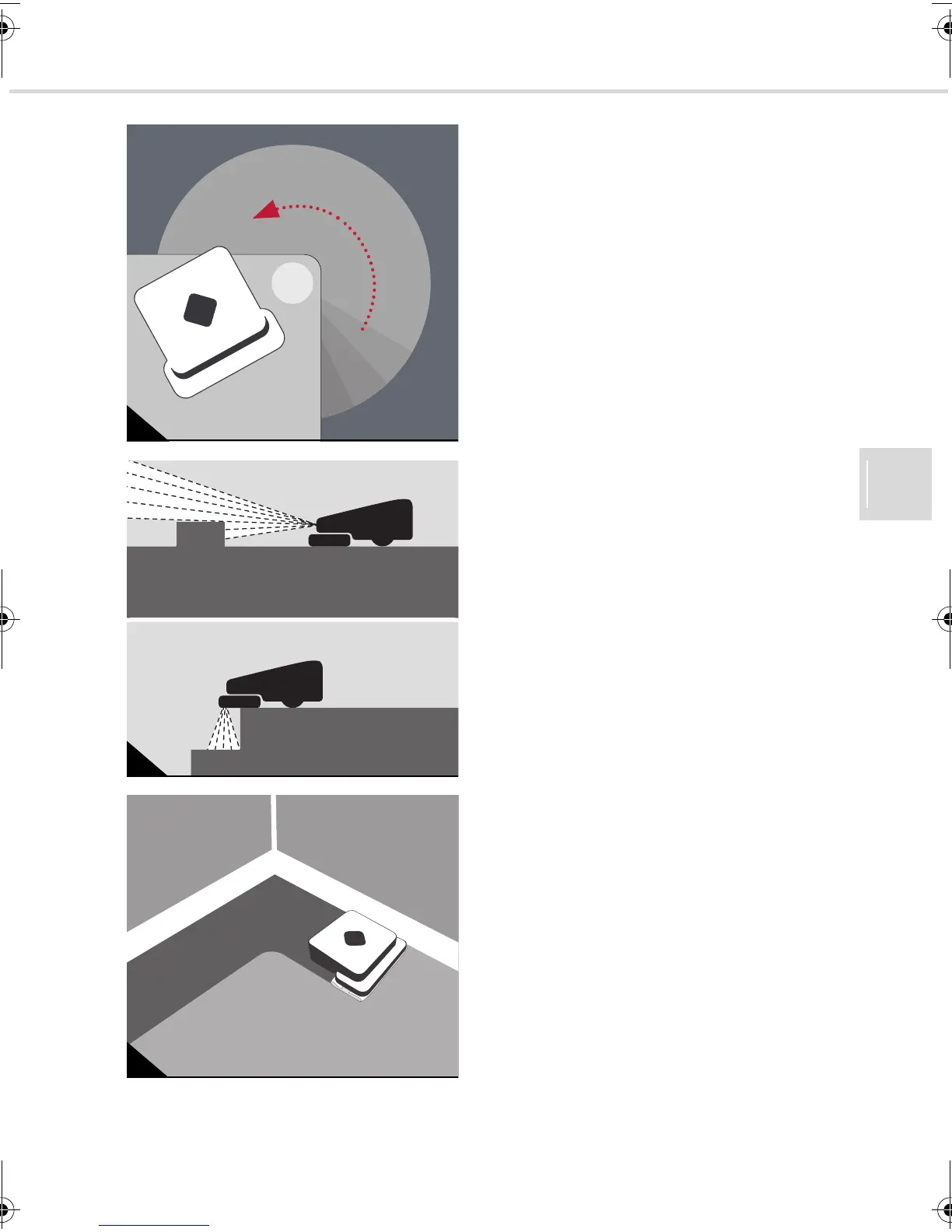
Après avoir parcouru les zones d'angles à la
fin du processus de nettoyage (Ill. 8), le robot
laveur de sol revient par lui-même à sa posi-
tion de départ.
Vous pouvez aussi utiliser le robot laveur de
sol sans qu'il communique avec le cube de
commande. La surface de nettoyage est ce-
pendant plus petite et le nettoyage des angles
à la fin du processus de nettoyage n'a pas
lieu.
6
7
8
Evo.book Seite 47 Donnerstag, 21. Oktober 2010 3:34 15