- 18 -
- 19 -
Fu nct ion C ode T abl e
EC 600 0
Fu nct ion C ode T abl e
EC 600 0
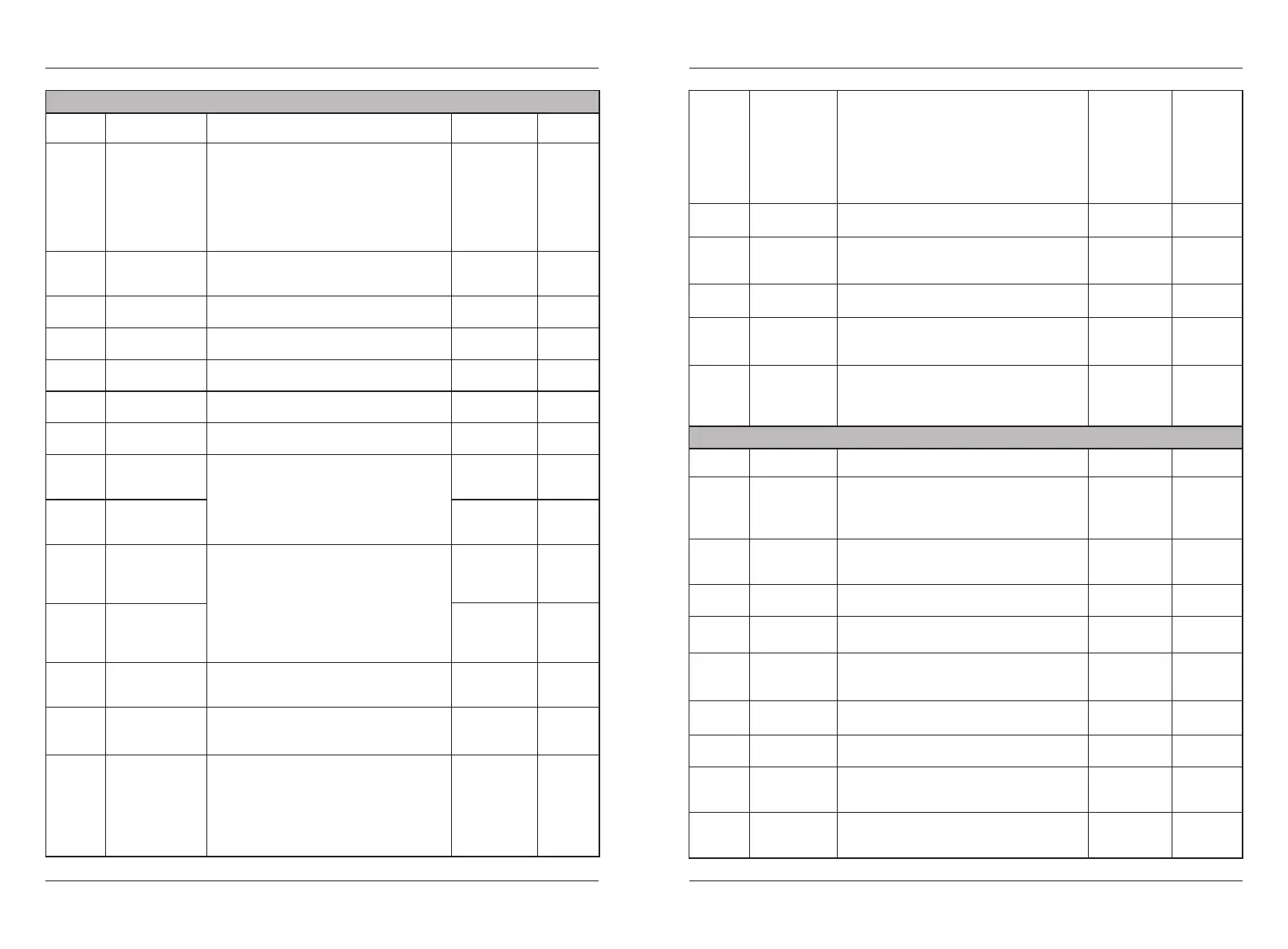
P1 M o to r par ame te rs
Setting Range
Function
Code
Parameter Name
Address
Default
P1-00
Motro
Auto-tuning
selection
0100H
0:No auto-tuning
1:Asynchronous motor stationary
auto-tuning
2:Asynchronous motor (rotational)complete
auto-tuning
3:Reserved
0
P1-01
Motor type
0101H
0: Common asynchronous motor
1: Variable frequency asynchronous motor
0
P1-02
Motor rated power
0102H
0.1kW~1000.0kW
Model
dependent
P1-03
Motor rated
voltage
0103H
1V~2000V
Model
dependent
P1-04
Motor rated
current
0104H
P1-11~655.35A (AC Drive<=55kW)
P1-11~6553.5A (AC Drive>55kW)
Model
dependent
P1-05
Motor rated
frequency
0105H
0.01Hz~maximum frequency
Model
dependent
P1-06
Motor rated
rotational speed
0106H
1rpm~65535rpm
Model
dependent
P1-07
Stator resistance
(asynchronous
motor)
0107H
0.001Ω ~ 65.535Ω
(AC Drive<=55kW)
0.0001Ω ~ 6.5535Ω
(AC Drive>55kW)
Model
dependent
P1-08
Rotor resistance
(asynchronous
motor)
0108H
Model
dependent
P1-09
Leakage inductive
reactance
(asynchronous
motor)
0109H
0.01mH ~ 655.35mH
(AC Drive<=55kW)
0.001mH ~ 65.535mH
(AC Drive>55kW)
Model
dependent
P1-10
010AH
Model
dependent
Mutual inductive
reactance
(asynchronous
motor)
P1-11
No-load current
(asynchronous
motor)
010BH
0.01A ~ P1-04 (AC Drive<=55kW)
0.1A ~ P1-04 (AC Drive>55kW)
Model
dependent
P1-12
~
P1-16
Reserved
010CH
~
0110H
- -
P1-23
Encoder type
BIT0:Encoder type
0: ABZ incremental encoder
1: UVW incremental encoder
2: Resolver 3: SIN/COS encoder
4: Wire-saving UVW encoder
0117H
000
0118H
0119H
011AH
011BH
011CH
1024
0.0°
1
2.00s
0.0°
P1-24
P1-25
P1-26
P1-27
P1-28
Encoder pulses
per revolution
Encoder
wire-break
fault
detection time
Encoder
installation
angle
UVW encoder
angle offset
Number of
pole pairs of
resolvert
0~60000
0.00 60.00s~
0.0~359.9°
0.0~359.9°
1~100
P2 V e ct or Co ntr ol P ara met er s
P2-00
P2-01
P2-02
P2-03
Function
Code
Vector
control mode
Speed loop
proportional
gain 1
Speed loop
integral time 1
Switchover
frequency 1
Parameter Name
BIT0: SFVC optimization mode selection
1: optimization mode 1
2: Optimization mode 2
BIT1: Reserved BIT2: Reserved BIT3: Reserved
1~100
0.01~10.00s
0.00~P2-06
Setting Range
0001
30
0.50s
5.00Hz
Default
0200H
0201H
0202H
0203H
Address
Slip
compensation
factor
P2-04
P2-05
P2-06
P2-07
P2-08
Speed loop
integral time 2
Speed loop
proportional
gain 2
Switchover
frequency 2
Time constant
of speed loop
filter
0.01~10.00s
1~100
P2-03~maximum frequency
50~200%
0.001~1.000s
20
1.00s
10.00Hz
100%
0.10s
0204H
0205H
0206H
0207H
0208H
0117H
000
P1-23
Encoder type
BIT1:A/B phase sequence of ABZ incremental
encoder
0: Forward 1: Reverse
BIT2:U, V, W phase sequence of UVW encoder
0: Forward 1: Reverse
BIT3:UVW encoder
0: Forward 1: Reverse