- 14 -
- 15 -
Fa ult s and s olu tio ns
EC 600 0
Fa ult s and s olu tio ns
EC 600 0
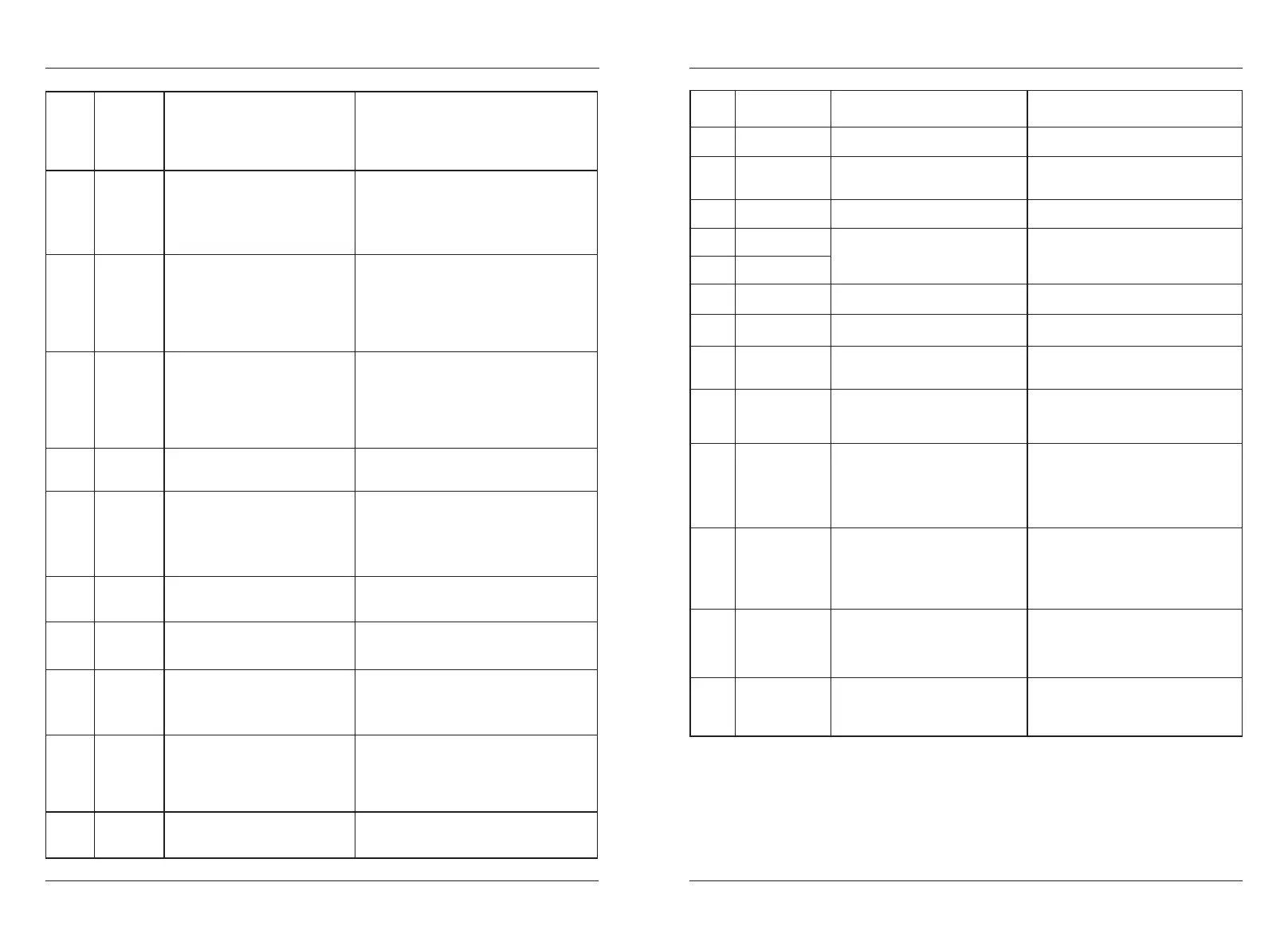
Err11
Motor
overload
1: P9-23 is set improperly.
2: The load is too heavy or
locked rotor occurs on the motor.
3: The AC drive model is of too
small power class.
1: Set it correctly.
2: Reduce the load and check the motor and
the mechanical condition.
3: Select an AC drive of higher power
class.
Err12
Power input
phase loss
1: The three-phase power input is
abnormal.
2: The drive board is faulty.
3: The lightening board is faulty.
4: The main control board is
faulty.
1: Eliminate external faults.
2: Seek technical support.
3: Seek technical support.
4: Seek technical support.
Err13
Power output
phase loss
1: The cable connecting the AC
drive and the motor is faulty.
2: The AC drive's three-phase
outputs are unbalanced when the
motor is running.
3: The drive board is faulty.
4: The module is faulty.
1: Eliminate external faults.
2: Check whether the motor three-phase
winding is normal.
3: Seek technical support.
4: Seek technical support.
Err14
Module
overheat
1: The ambient temperature is too
high.
2: The air filter is blocked.
3: The fan is damaged.
4: The thermally sensitive
resistor of the module is damaged.
5: The inverter module is damaged.
1: Lower the ambient temperature.
2: Clean the air filter.
3: Replace the damaged fan.
4: Replace the damaged thermally
sensitive resistor.
5: Replace the inverter module.
Err15
Err16
External
equipment
fault
Communi-
cation
fault
1: External fault signal is input
via S.
1: The host computer is in
abnormal state.
2: The communication cable is
faulty.
3: The communication parameters
in group PB are set improperly.
1:Reset the operation.
1: Check the cabling of host computer.
2: Check the communication cabling.
3: Set the communication parameters
properly.
Err17
Err18
Contactor
faul
Current
detection
fault
1: The drive board and power
supply are faulty.
2: The contactor is faulty.
1: The HALL device is faulty.
2: The drive board is faulty.
1: Replace the faulty drive board or
power supply board.
2: Replace the faulty contactor.
1: Replace the faulty HALL device.
2: Replace the faulty drive board.
Err19
Motor
auto-tuning
fault
1: The motor parameters are not
set according to the nameplate.
2: The motor auto-tuning times
out.
1: Set the motor parameters according
to the nameplate properly.
2: Check the cable connecting the AC
drive and the motor.
Err20
Encoder
fault
1: The encoder type is incorrect.
2: The cable connection of the
encoder is incorrect.
3: The encoder is damaged.
4: The PG card is faulty.
1: Set the encoder type correctly
based on the actual situation.
2: Eliminate external faults.
3: Replace the damaged encoder.
4: Replace the faulty PG card.
Err21
Err22
EEPROM
readwrite
fault
AC drive
hardware fault
1: The EEPROM chip is damaged.
1: Overvoltage exists.
2: Overcurrent exists.
1: Replace the main control panel.
1: Handle based on over-voltage.
2: Handle based on over-current.
Err23
Short circuit
to ground
1: The motor is short circuited
to the ground.
1: Replace the cable or motor.
Err24
Err26
EEPORM
Initialization
fault
1: Abnormal user data.
1: Reinitialize data and set
parameters.
Running
time reached
1: Accumulative running time
reaches setting.
1: Clear the record through the
parameter initialization function.
Err29
Power-on time
reached
Err30
1: Accumulative power-ontime
reaches the setting.
1: The AC drive running current
is lower than P9-38.
1: Clear the record through the
parameter initialization function.
1: Check the load is disconnected or
P9-38 and P9-39 is correct.
Load
becoming 0
Err27
Err28
User-defined
fault 1
User-defined
fault 2
1: The user-defined fault 1 signal
is input via S.
1: Reset the operation.
Err31
Err40
PID feedback
lost during
running
Pulse-by-pulse
current
limit fault
1: The PID feedback is lower than
the setting of PA-27.
1: The load is too heavy or
lockedrotor occurs on the motor.
2: The AC drive model is of too
small power class.
1: Check the PID feedback signal or
set PA-27 to a proper value.
1: Reduce the load and check the
motor and mechanical condition.
2: Select the AC drive of higher
power class.
Err42
Err43
Too large
speed
deviation
Motor
over-speed
1: The encoder parameters are set
incorrectly.
2: The motor auto-tuning is not
performed.
3: P9-42 and P9-43 are set
incorrectly.
1: The encoder parameters are set
incorrectly.
2: The motor auto-tuning is not
performed.
3: P9-40 and P9-41 are set
incorrectly
1: Set the encoder parameters
properly.
2: Perform the motor autotuning.
3: Set F9-69 and F9-70 correctly
based on the actual situation.
1: Set the encoder parameters
properly.
2: Perform the motor auto-tuning.
3: Set P9-40 and P9-41 correctly
based on the actual situation.
Err45
Err51
Motor
overheat
Pole position
detection
failed
1: The cabling of the temperature
sensor becomes loose.
2: The motor temperature is too
high.
1: The deviation between the motor
parameters and the actual value is
too large.
1: Check the temperature sensor
cabling and eliminate the cabling
fault.
2: Lower the carrier frequency or
adopt other heat radiation measures.
1: Reconfirm whether the motor
parameters are correct, and focus on
whether the rated current is set too
small.