Connection diagrams
10.
358
Ref.1912
DDS
HARDWARE
· 330 ·
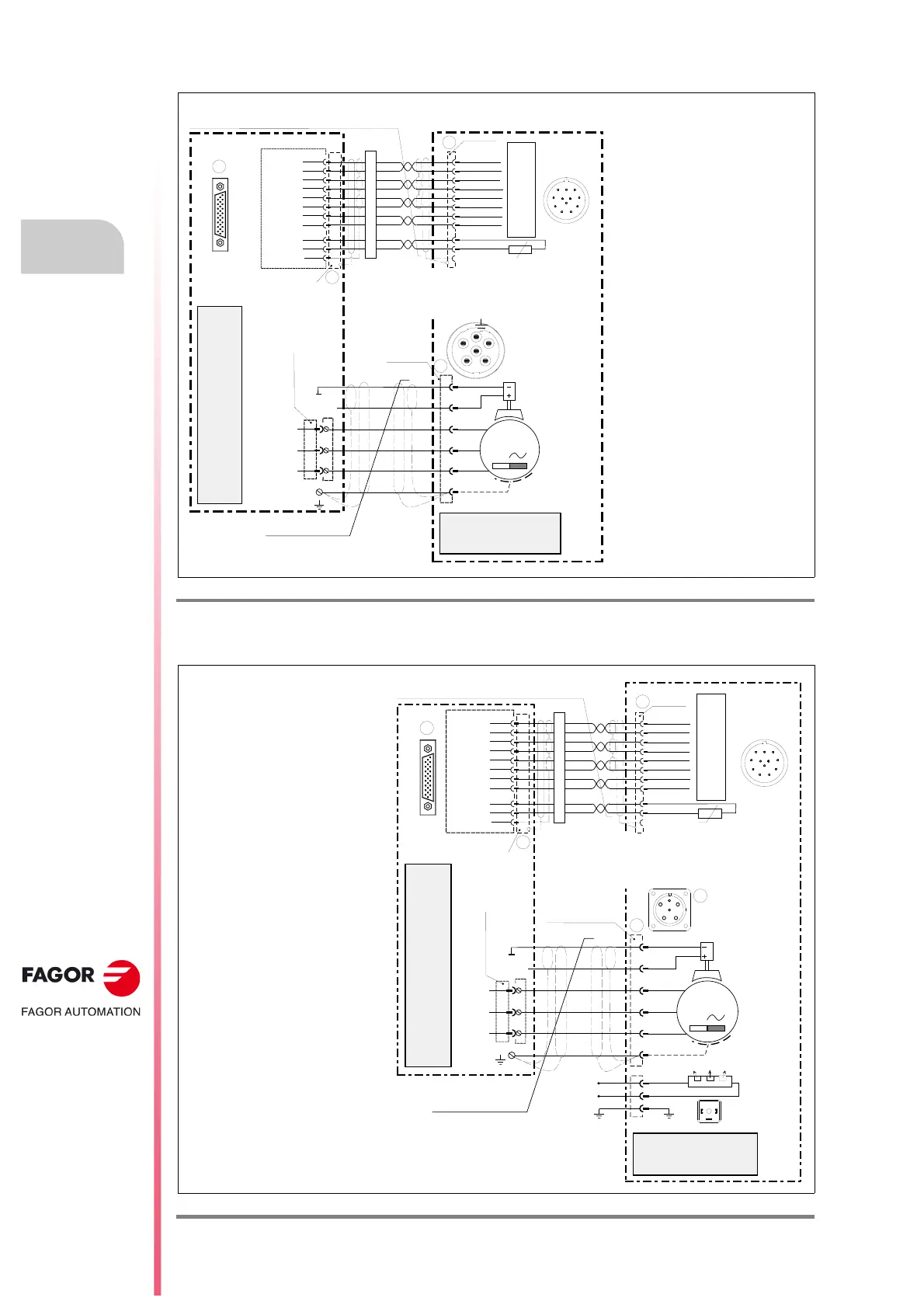
10.2 AXD modular drive with FKM synchronous axis servomotor
10.3 AXD modular drive with FXM synchronous axis servomotor
F. H10/2
AXD modular drive with an FKM synchronous axis servomotor with encoder E3. Connection
F. H10/3
AXD modular drive with an FXM synchronous axis servomotor with encoder E1. Connection.
Connection diagram of an
AXD modular drive with an
FKM synchronous axis
servomotor that has an
encoder E3.
M
3
M P C - 4 x . . . ( m m 2 ) + 2 x 1
U
V
W
6
5
3
2
4
1
X 1
( P h o e n i x , 7 . 6 m m , M 3 )
U
V
W
C a b l e w i t h o u t c o n n e c t o r s
M C - 2 0 / 6
s o c k e t
+ 2 4 V D C
9
1
2 6
1 9
( H D ,
S u b - D ,
F 2 6 )
X 4
( H D , S u b - D , M 2 6 )
X 4
( w i t h b r a k e )
E E C - S P - 3 / 5 / 6 / 7 / 8 / 9 / 1 0 / 1 1 / 1 2 / 1 5 / 2 0 / 2 5 / 3 0 / 3 5 / 4 0 / 4 5 / 5 0 / 6 0
L e n g t h i n m e t e r s ; i n c l u d i n g c o n n e c t o r s
R e a d y m a d
e c a b l e
S h i e l d e d b y p a i r s o f c a b l e s a n d o v e r a l l s h i e l d .
T h e s h i e l d s o f t w i s t e r p a i r s m u s t b e c o n n e c t e d t o e a c
h o t h e r a n d o n l y a t
t h e d r i v e e n d j o i n e d t o t h e c o m m o n p i n o f t h e c h a s s i s ( p i n 2 6 ) . T h e o v e r a l l
s c r e e
n m u s t b e c o n n e c t e d t o t h e c o n n e c t o r h o u s i n g a t t h e d r i v e e n d a n d
t o t h e m e t a l l i c h o u s i n g a n d t o p i n
9 o f t h e c o n n e c t o r a t t h e m o t o r e n d .
T h e h o u s i n g o f t h e 2 6 - p i n c o n n e c t o r m u s t b e c o n d u c t i v e ( m e t a l l i c
) .
M C - 2 0 / 6
b a s e
H o l d i n g b r a k e ( o p t i o n )
R T D
E O C - 1 2
B l u e
B l a c k
G r e e n
B r o w n
G r e y
P u r p l e
W h i t e
R e d
2 0
1 9
1 1
2
1 0
1
2 1
2 2
1 0
2
6
5
1
8
3
4
2 6
2 5
1 2
R E F C O S
S I N
R E F S I N
+ 4 8 5
- 4 8 5
G N D
+ 8 V D C
C O S
7
2 3
X 2
Y e l l o w
B l a c k
C H A S S I S
S I N
R E F S I N
+ 4 8 5
G N D
+ 8 V D C
T E M P -
+ t °
E 0 C - 1 2
1
2
3
4
1 1
1 01 2
7
8
6
5
9
f r o n t v i e w
P t 1 0 0 0
T E M P +
t e m p +
t e m p -
C a b l e 3 x 2 x 0 . 1 4 + 4 x 0 . 1 4 + 2 x 0 . 5
C O S
R E F C O S
- 4 8 5
9
A x i s M o t o r
F K M . . . E 3 . . .
E 3 S I N C O S S I N U S O I D A L
E N C O D E R
4
5
1
6
2
3
2 4 V R e l e a s e d
0 V H o l d i n g
D i g i t a l A x i s M o d u l a r D r i v e
A X D 1 . 2 5 - A 1 - 1
M
3
H o l d i n g B r a k e ( O p t i o n )
M P C - 4 x . . . ( m m
2
) + 2 x 1
U
V
W
C
F
D
B
E
A
+ 2 4 V D C
9
1
2 6
1 9
( H D ,
S u b - D ,
F 2 6 )
X 4
X 1
( P h o e n i x , 7 . 6 m m , M 3 )
2 4 V R e l e a s e d
0 V H o l d i n g
E
D
A
C
B
F
X 1
U
V
W
C a b l e w i t h o u t c o n n e c t o r s
2 2 0 V A C
5 0 / 6 0 H z
1
2
3
1
2
3
D i g i t a l A x i s M o d u l a r D r i v e
A X D 1 . 2 5 - A 1 - 1
A x i s M o t o r
F X M . . . E 1 . . .
M C - 2 3 O R
M C - 4 6 b a s e
M C - 2 3 O R
M C - 4 6 s o c k e t
E l e c t r i c F a n ( O p t i o n )
S h i e l d e d b y p a i r s o f c a b l e s a n d o v e r a l l s h i e l d .
T h e s h i e l d s o f t w i s t e r p a i r s m u s t b e c o n n e c t e d t o e a c
h o t h e r a n d o n l y a t t h e
d r i v e e n d j o i n e d t o t h e c o m m o n p i n o f t h e c h a s s i s ( p i n 2 6 ) .
T h e o v e r a l l s c r e e
n m u s t b e c o n n e c t e d t o t h e c o n n e c t o r h o u s i n g a t t h e d r i v e
e n d a n d t o t h e m e t a l l i c h o u s i n g a n d t o p i n
9 o f t h e c o n n e c t o r a t t h e m o t o r e n d .
T h e h o u s i n g o f t h e 2 6 - p i n c o n n e c t o r m u s t b e c o n d u c t i v e ( m e t a l l i c
) .
P T C
E O C - 1 2
( H D , S u b - D , M 2 6 )
X 4
B l u e
B l a c k
G r e e n
B r o w n
G r e y
P u r p l e
W h i t e
R e d
2 0
1 9
1 1
2
1 0
1
2 1
2 2
1 0
2
6
5
1
8
3
4
2 6
2 5
1 2
R E F C O S
S I N
R E F S I N
+ 4 8 5
- 4 8 5
G N D
+ 8 V D C
C O S
7
2 3
X 2
Y e l l o w
B l a c k
E 1 S I N C O D E R S T E G M A N N
S N S 5 0 E N C O D E R
C H A S S I S
S I N
R E F S I N
+ 4 8 5
G N D
+ 8 V D C
T E M P
+ t °
E 0 C - 1 2
1
2
3
4
1 1
1 01 2
7
8
6
5
9
f r o n t v i e w
T E M P
t e m p +
t e m p -
C a b l e 3 x 2 x 0 . 1 4 + 4 x 0 . 1 4 + 2 x 0 . 5
C O S
R E F C O S
- 4 8 5
9
E E C - S P - 3 / 5 / 6 / 7 / 8 / 9 / 1 0 / 1 1 / 1 2 / 1 5 / 2 0 / 2 5 / 3 0 / 3 5 / 4 0 / 4 5 / 5 0 / 6 0
L e n g t h i n m e t e r s ; i n c l u d i n g c o n n e c t o r s
R e a d y m a d
e c a b l e
( w i t h b r a k e )
Connection diagram of an AXD modular drive with an FXM
synchronous axis servomotor that has an encoder E1.