—————— Instruction manual ——————
175
T current ref Totalcurrentreference asapercentageofFull load curr.Forthisparameterthe
TPD32-EV...4B...convertersneedapositivevalue.Inthiscasethenegativereferences
areprocessedandcorrespondtoazeroreference.
Mot cur threshld WhenthemotorcurrentexceedstheFullLoadCurrentpercentagethreshold,thiscondi-
tionissignalledviaadigitaloutput.
Mot cur th delay TheMot cur th delayparametercanbeusedtosetthedelayafterwhichthecurrent
withinlimitconditionissignalled..
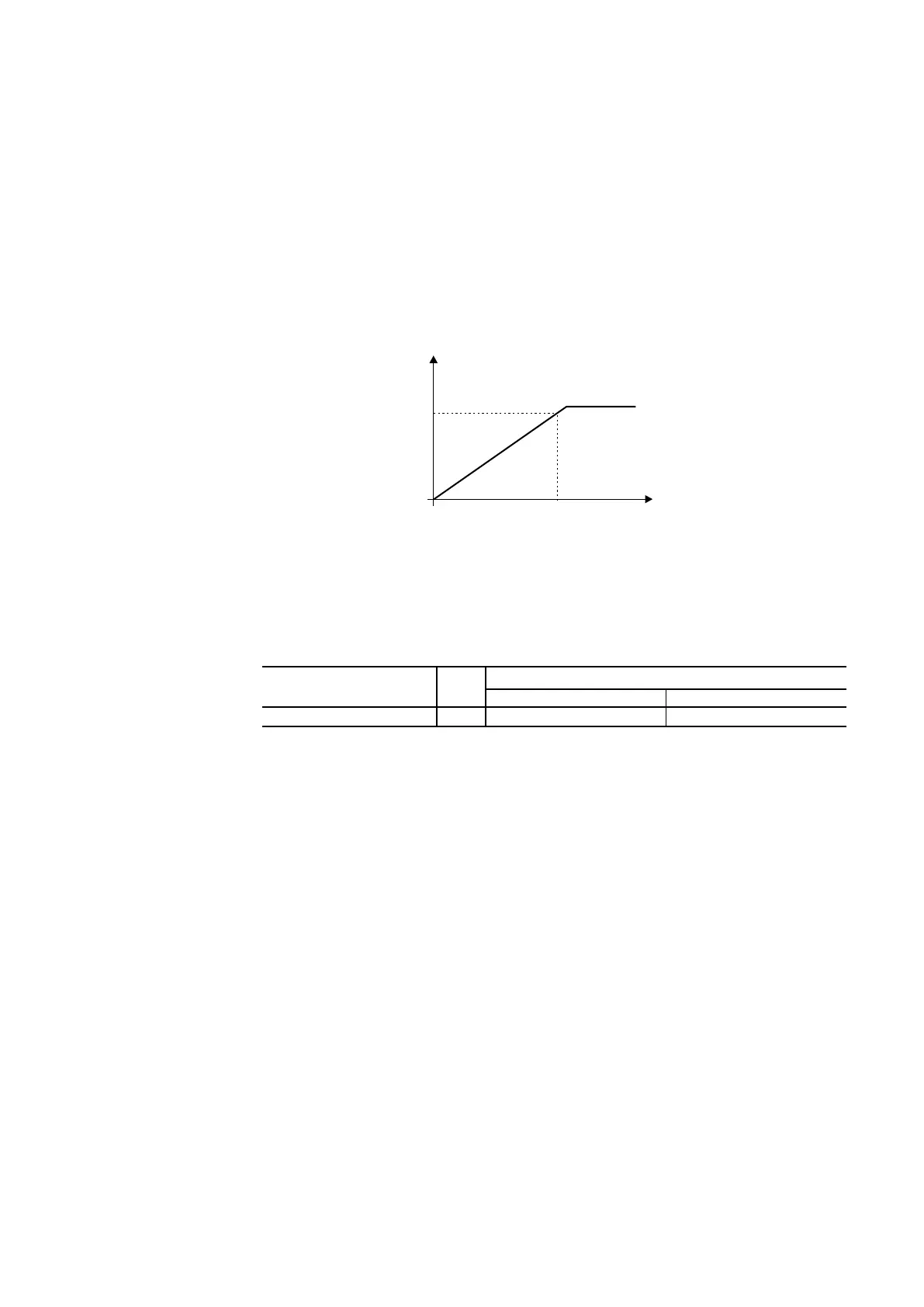
dI/dt delta time Thisparameterisusedtochangethetime(andthustherampgradient)withinwhich
thevalueofT current ref (parameter41)changesfrom0to100%.
current ref [%]
100
Arm resistance MotorarmatureresistanceinW.Whenself-tuningcycleisperformedviaR&L Search
thisparameterissettotheobtainedvalue.Therefore,ifnecessary,itcanbechanged.
Arm inductance MotorarmatureinductanceinmH.Whenself-tuningcycleisperformedviaR&L
Searchthisparameterissettotheobtainedvalue.Therefore,ifnecessary,itcanbechanged.
Parameter N.
Value max
sizes 185 ... 1050 A sizes > 1050 A
Arm inductance [mH]
454 50mH 30mH
E int Auxiliarysignalusedtodeterminewhetherthecurrentregulatoriscorrectlytuned.Its
valueshouldbeclosetozero,butvaluesdynamicallychangingbetween-40and40are
accettable.
Thedrivemusthaveatleast30%loadforthisreadingtobeconsideredasavalidper-
formancemeasurement(seechapter5.3.5.1.1formoredetailsetting).
R&L Search Executionofself-tuningforthecurrentregulator.Theidentiedvaluesforresistanceand
inductancearmaturearesettotheArm resistanceandArm inductanceparameters.
Zero torque TheparametercanbeusedtosetthereferencevalueforthearmaturecurrentT cur-
rent reftozerosothatthedrivehasnomoretorque.
Notactive(H) T current ref notsettozero
Active(L) T current refsettozero.Thedrivehasnotorque.
 Loading...
Loading...



