Appendix Ⅰ Servo system application
Ⅰ-2
③ Obtain the load feed rate per load axis rotation in the unit of command.
: Command unit = 0.001[mm], ball screw pitch = 5[mm],
Load feed per load axis revolution [Command unit] = 5/0.001 = 5000[Command unit]
④ Get electronic gear ration in case of reduction ratio
⎟
⎠
⎞
⎜
⎝
⎛
a
b
ratioReduction
uni
Comman
4pulseencoder motor ofNumber
)
DEN
NUM
ratio(gear Electronic ×
=
⑤ The result of calculating the electronic gear ratio must be between 0.05~20.
⑥ Set the applicable parameter.
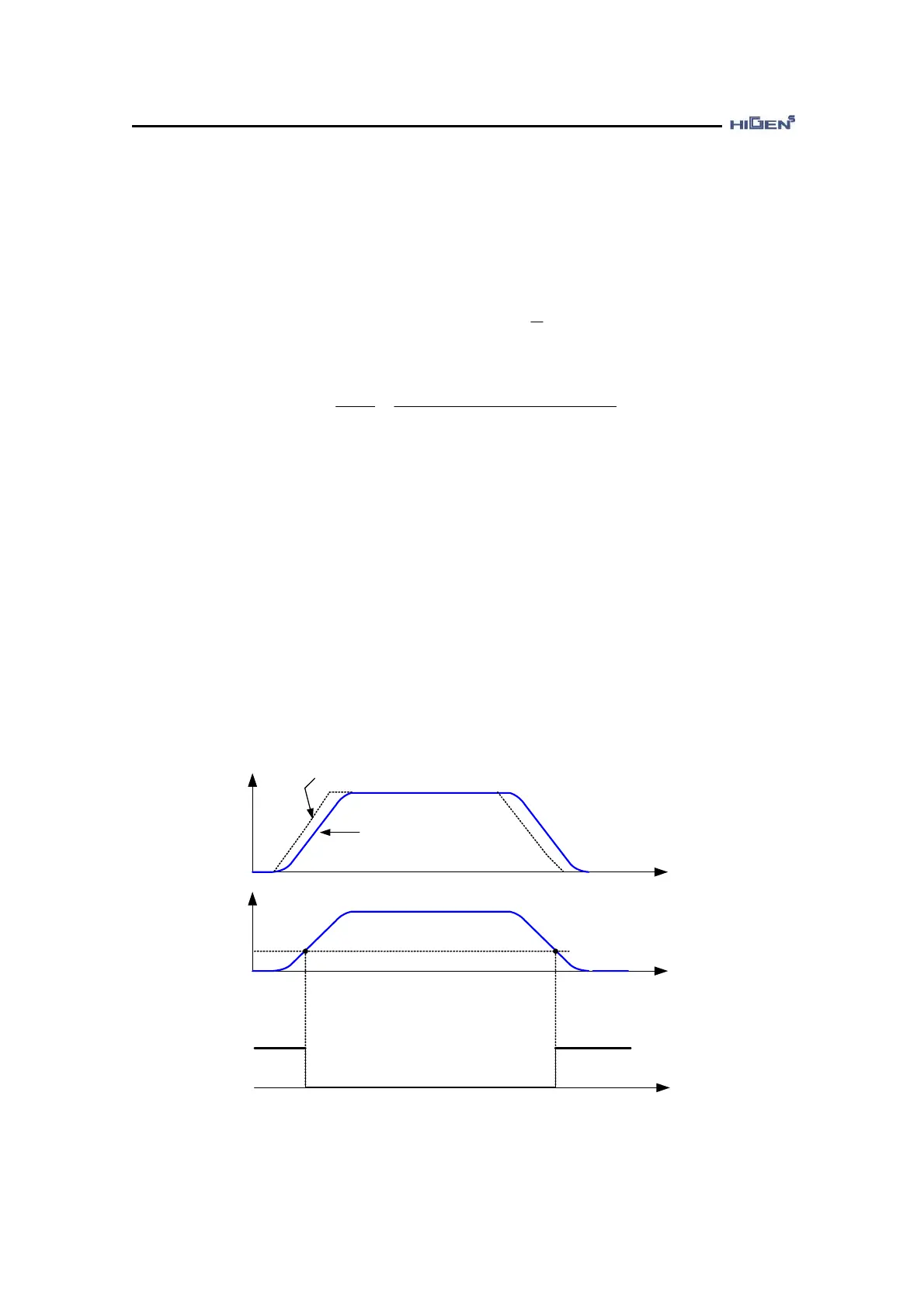
[ Position completion range setting ]
In position control mode, the positioning completed signal in output when the difference
between the number of command pulse output by the host controller and the movement
distance of the servo motor in less than value set in user menu P08.
In position
completion range
Time [sec]
OFF
ON
In position completion
Command speed
Actual speed
Speed
Error
pulse
Time [sec]
 Loading...
Loading...