4. Servo using method and gain adjustment
4-9
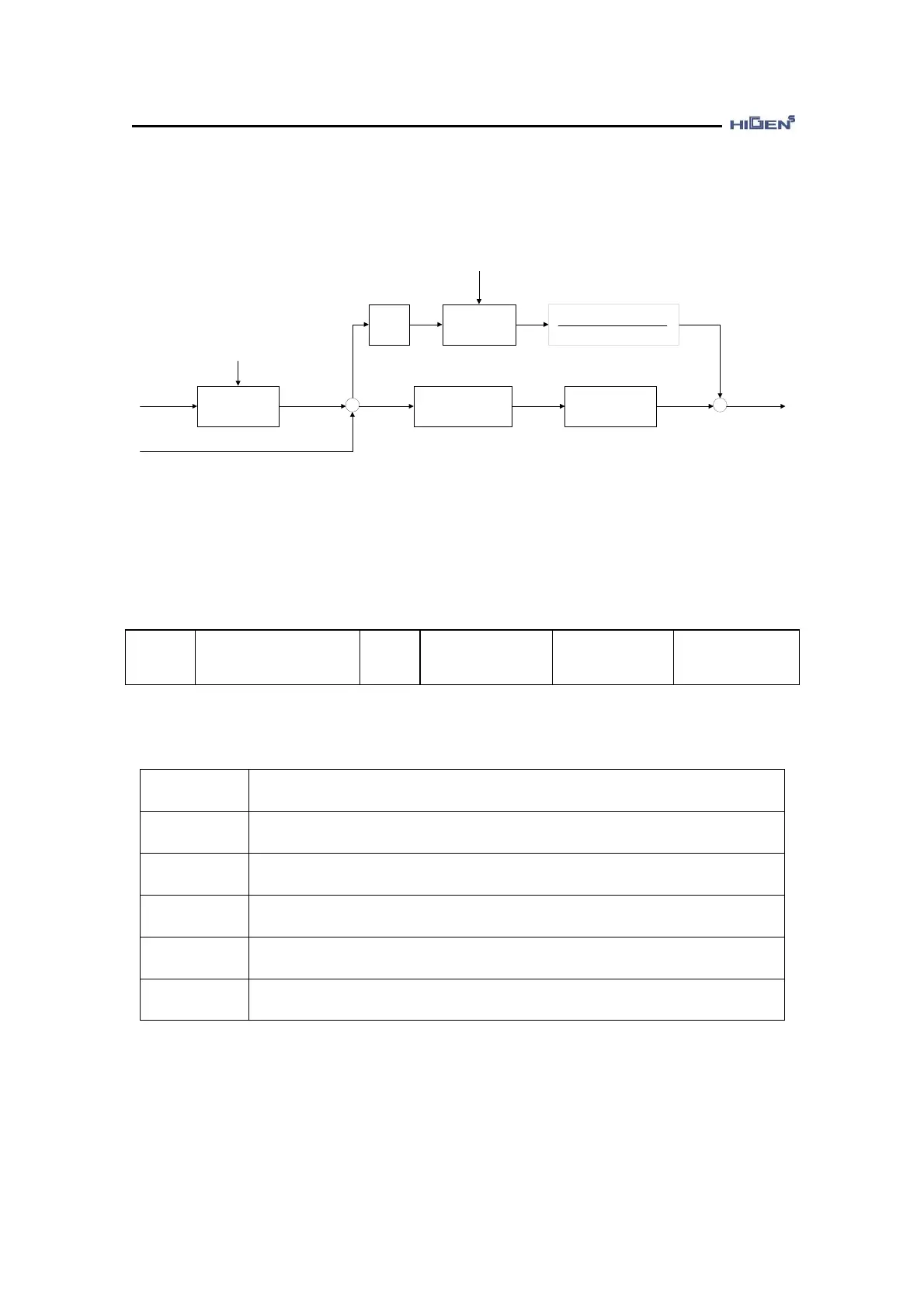
4.2.2 Position servo gain adjustment
Position
command
1st filter
[Position command pulse TC
(P05-10)]
+
-
Internal
position
command
Position
Differentiation
1st filter
[Feed forward TC (P05-11)]
[PC P Gain
(P05-05, P05-06)]
+
+Position
error
Speed
command
[Feedforward (P05-04)]
100
[POS Gain mode
(P05-01)]
(Note) In this control mode, Error pulse should be cleared according to the servo condition.
Before the stop function release, the error pulse is cleared by PLSCLR action.
1) This sets the position control gain mode.
P05-01
POS Gain Mode
Unit
-
Display range
1 ~ 5
Manufactured
default
1
Position control
When the servo drive set to position control mode, this sets the position control gain mode.
Set value Operation explanation
1
Use PC P gain 1 (P05-05).
2
Use PC P gain 2 (P05-06).
3
Apply variable gain using gain 1 (P05-05) and gain 2 (P05-06) according to
set speed (P02-20, P02-21) for the position controller gain.
4
Apply variable gain using gain 1 (P05-05) and gain 2 (P05-06) according to
set torque (P02-22, P02-23) for the position controller gain.
5
Select gain 1 (P05-05) or gain 2 (P05-06) by the external contact point
signal for the position controller gain.
2) This sets the PC P gain applied by the set value of P05-01