24 | Optidrive CoolVert User Guide | Version 1.00 www.invertekdrives.com
4
Set-up and Operation
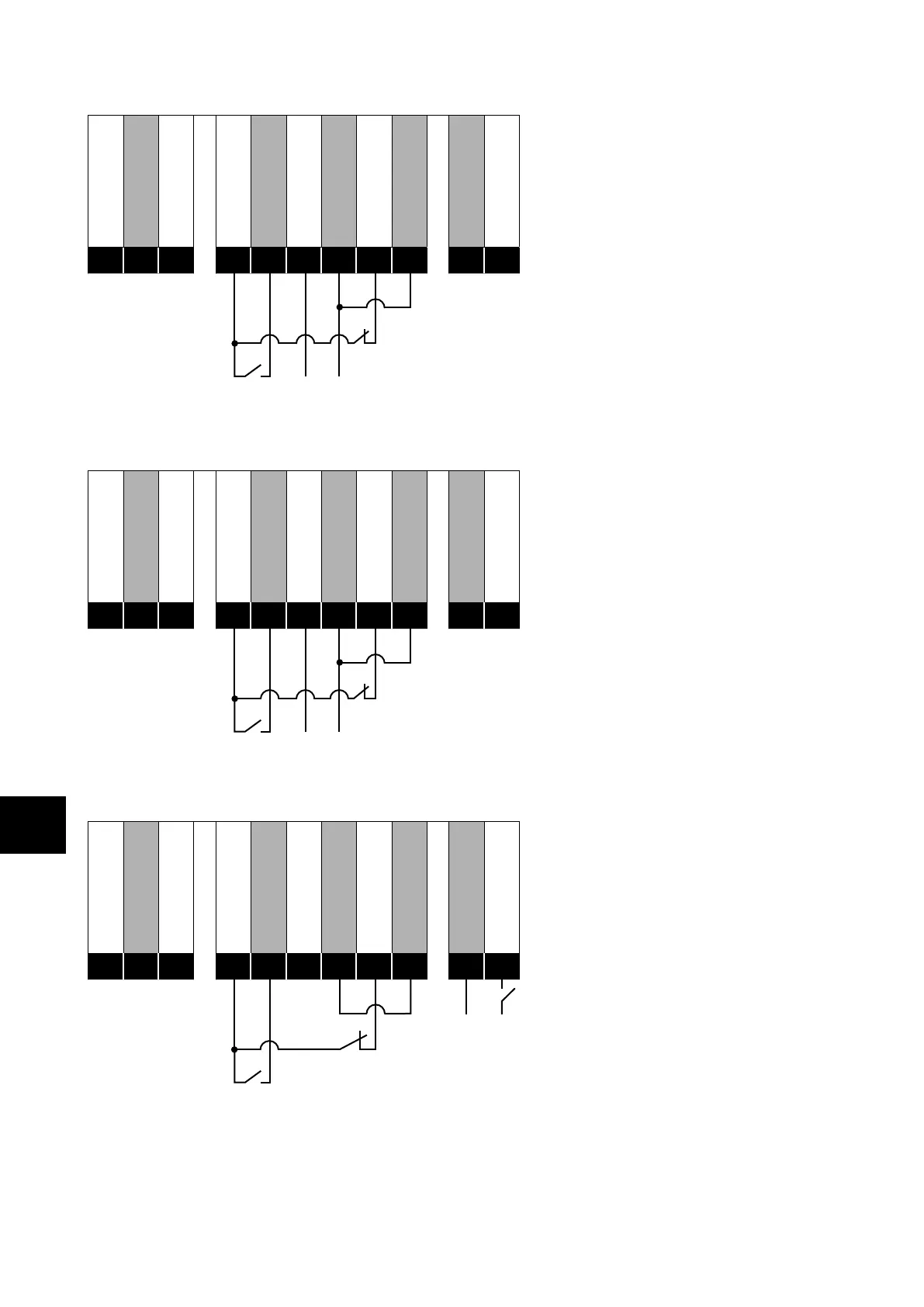
P1-11 = 1 or 2 Terminal mode
0V Common
Modbus TX/RX +
Modbus TX/RX -
+24V Output (100mA)
Digital Input 1
Analogue Input 1
0V Common
STO +
STO -
User Relay A
User Relay B
1
2
3
4
5
6
7
8
9
10
11
STO signal must be provided in order to permit running the motor. Start/Stop command provided by the Digital Input (P1-11 = 1) or
when the analogue input level is greater than 1% (if P1-11 =2) and speed reference provided by the Analogue input.
P1-11 = 3 Internal PI mode
0V Common
Modbus TX/RX +
Modbus TX/RX -
+24V Output (100mA)
Digital Input 1
Analogue Input 1
0V Common
STO +
STO -
User Relay A
User Relay B
1
2
3
4
5
6
7
8
9
10
11
STO signal must be provided in order to permit running the motor. Start/Stop command provided by the Digital Input. The speed
reference is provided by the output of the PI controller and the PI feedback is provided by the analogue input.
P1-11 = 4 Slave mode
0V Common
Modbus TX/RX +
Modbus TX/RX -
+24V Output (100mA)
Digital Input 1
Analogue Input 1
0V Common
STO +
STO -
User Relay A
User Relay B
1
2
3
4
5
6
7
8
9
10
11