38 | Optidrive CoolVert User Guide | Version 1.00 www.invertekdrives.com
4
Set-up and Operation
Par
Mod
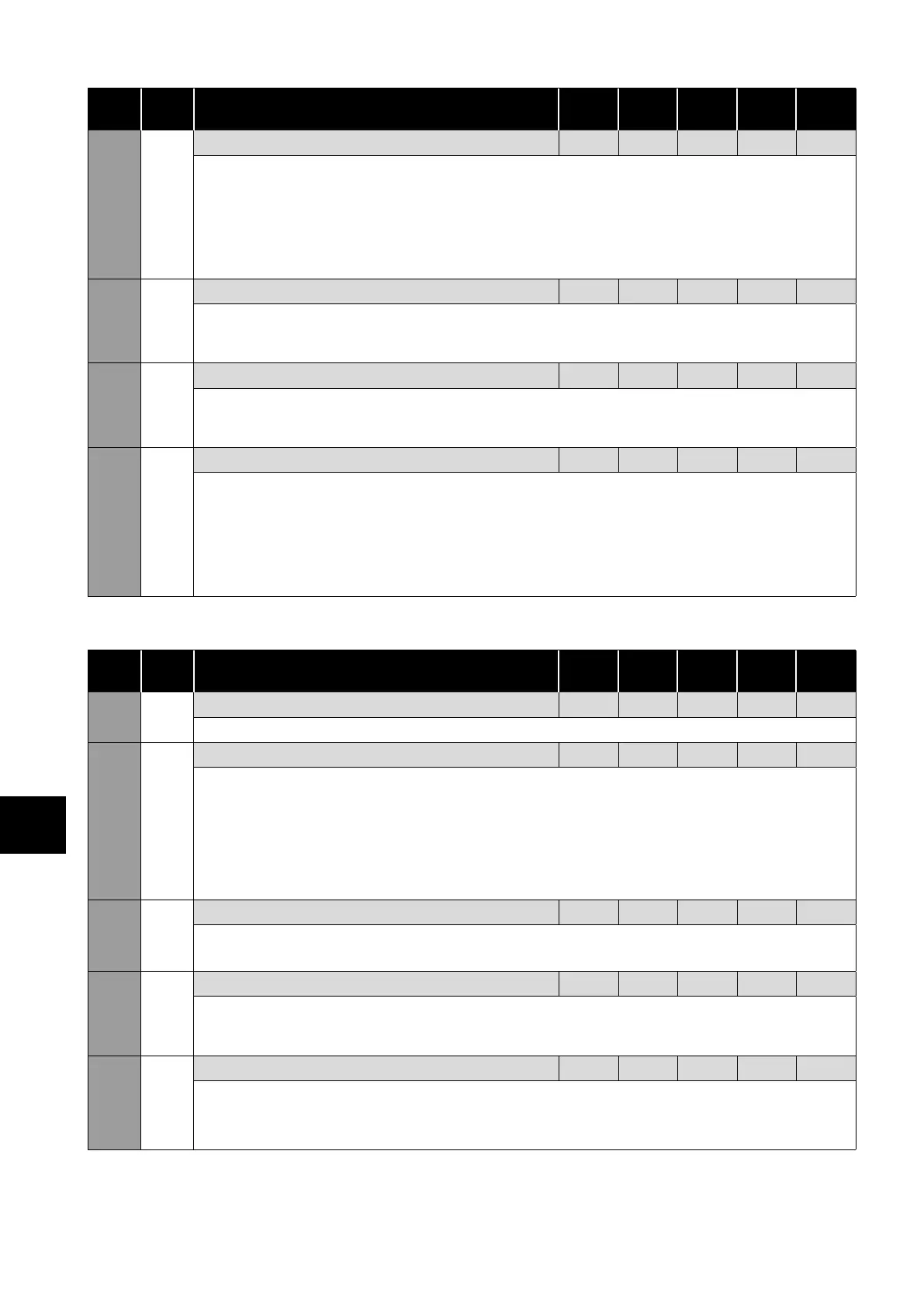
Add Description Def Min Max Unit R/W
5-14 514 Spin-start Enable 0 0 1 - R/W
When Enabled, the drive will attempt to determine if the motor is already rotating on start up, and to detect
rotational speed and direction. The drive will begin control of the motor from its present (detected) speed. A short
delay may be observed when starting the drive whilst the spin start function is completed.
0 : Disabled
1 : Enabled
2 : Enabled following Trip, Brown Out or Coast Stop
5-15 515 BLDC Low Load Optimisation 1 0 1 - R/W
When P5-01 = 0 (BLDC Motor Control) and P5-16 = 1 (Enabled) the drive will reduce the output voltage during
light load operation in order to improve motor efficiency. This setting has no effect if the motor is driven close to its
nominal current where the nominal flux level will be applied
5-16 516 C02 Compressor Mode Enable 0 0 1 - R/W
This mode increases the gain of the flux regulator to allow the drive to maintain control of some 2-stage
compressors that have a low level of stability during ramp-up. This mode can work well with most compressors
but should be disabled if aggressive start-up behaviour is observed with single stage low pressure compressors.
5-17 517 Stator Resistance Check on Run 0 0 1 - R/W
This parameter allows the stator resistance to be measured on each run or the first run after power up. This can
help to improve torque on start-up if the compressor has been flooded with super cold refrigerant which could
reduce the stator resistance and affect the drive performance.
0: Disabled
1: Enable on run
2: Enable on first run only
4.4.6. Group 6 Parameters & Modbus Registers
Par
Mod
Add Description Def Min Max Unit R/W
6-01 601 Fieldbus Drive Address 1 1 63 - R/W
Sets the drive network address when using a Fieldbus or Master Slave function
6-02 602 Modbus RTU Baud Rate 115 9.6 115 kbps R/W
9.6 kbps
19.2 kbps
38.4 kbps
57.6 kbps
76.8 kbps
115 kbps
6-03 603 Modbus Data Format 0 - 3 - R/W
0: None Parity 1 stop bit
1 : None parity 2 stop bits
2 : Odd parity 1 stop bit
3 : Even parity 1 stop bit
6-04 604 Communications Loss Timeout 5 0 60 S R/W
Sets the watchdog time period for the communications channel. With an active communication link, if a valid
telegram is not received by the drive within this time period, the drive will assume a loss of communications has
occurred and react as set in P6-05.
6-05 605 Communications Loss Action 0 0 3 - R/W
Controls the behaviour of the drive following a loss of communications.
0: Trip
1: Ramp to Stop then trip
2: Ramp to stop (No trip)
3: Signal Loss speed (P3-11)