Mini-JLT GNSS™ User Manual
20 © 2017 Jackson Labs Technologies, Inc.
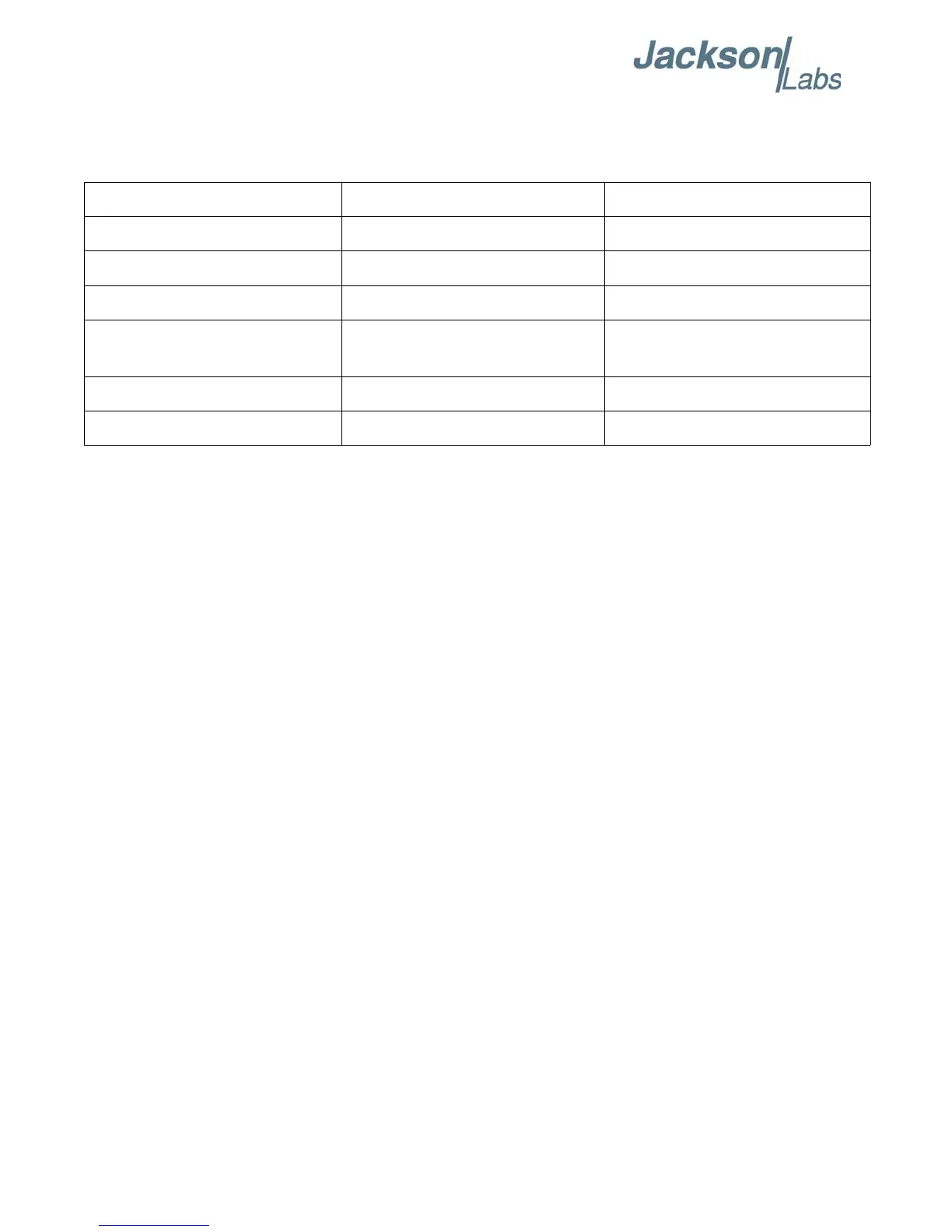
The following table shows the Dynamic mode the unit will program into the GNSS receiver when
Automatic Mode is selected (Dynamic Mode 8).
In this Automatic mode, the unit will configure the GNSS receiver based on the actual
vehicle-velocity:
Please note that in order to switch from the Automotive mode into the first Airborne (1g) mode, both
a vehicle velocity greater than 60 knots as well as a climb/descent rate greater than 400 feet per
minute are required. Alternatively, a vehicle velocity of greater than 100 Knots will also initiate a
switch into airborne-1g mode.
Without an appropriate climb/descent, the unit will remain in Automotive mode.
The following command returns the setting of the GNSS dynamic model:
GPS:DYNAMic:MODE?
The actual state chosen by the firmware for the GNSS receiver based on vehicle velocity can be
obtained with the command:
GPS:DYNAMic:STATe?
A value between 0 and 7 is then returned depending on vehicle dynamics.
The dynamic state is always set to STATIONARY if one of the Position Hold Auto Survey stationary
modes is selected using the command GPS:TMODE, as the Position Hold mode setting overrides any
dynamic state user setting.
Settings will be applied immediately to the GNSS receiver, and are stored in Non Volatile memory.
Velocity Threshold Selected Dynamic Model Fallback to lower setting
0 – 2 knots Stationary none
>2 knots Pedestrian <1 knots
>10 knots Automotive <8 knots
>60 knots and >400 Feet/min
climb/descent
Airborne 1g <50 knots
>150 knots Airborne 2g <130 knots
>240 knots Airborne 4g <210 knots