3-35
When using 1- axis log, heading speed component can be detected, but
transverse speed component cannot be detected. Then leeway effect
(component drifted by wind) cannot be defected.
When using 2-axises log, its accuracy in shallow waters may be deteriorated,
and its speed in deep sea areas may be unable to be detected.
When using a GPS, COG accuracy is less than ±3° at speed: from 1kn to
17kn , and is less than ±1° at speed: more than 17kn.
3.4.14 Set True Bearing
When the GYRO I/F is used to enter a gyro signal, there is a rare case in which a true bearing value
indicated by the master gyro does not match the true bearing value indicated by this radar system.
In that case, adjust the true bearing value of this system so that it matches the value indicated by the
master gyro.
Procedures 1 Open the numeric value input screen to enter a true bearing value by
performing the menu operation below.
Main
→ NAV Equipment Setting
2 Left-click the GYRO Setting item.
The value input screen to input a master GYRO value will appear.
3 Enter a value indicated by the master gyro on the numeric value input
screen.
For how to input numeric data on the numeric value input screen, see Section “3.3.6
Operation on Numeric Value, Latitude / Longitude and Character Input menu”.
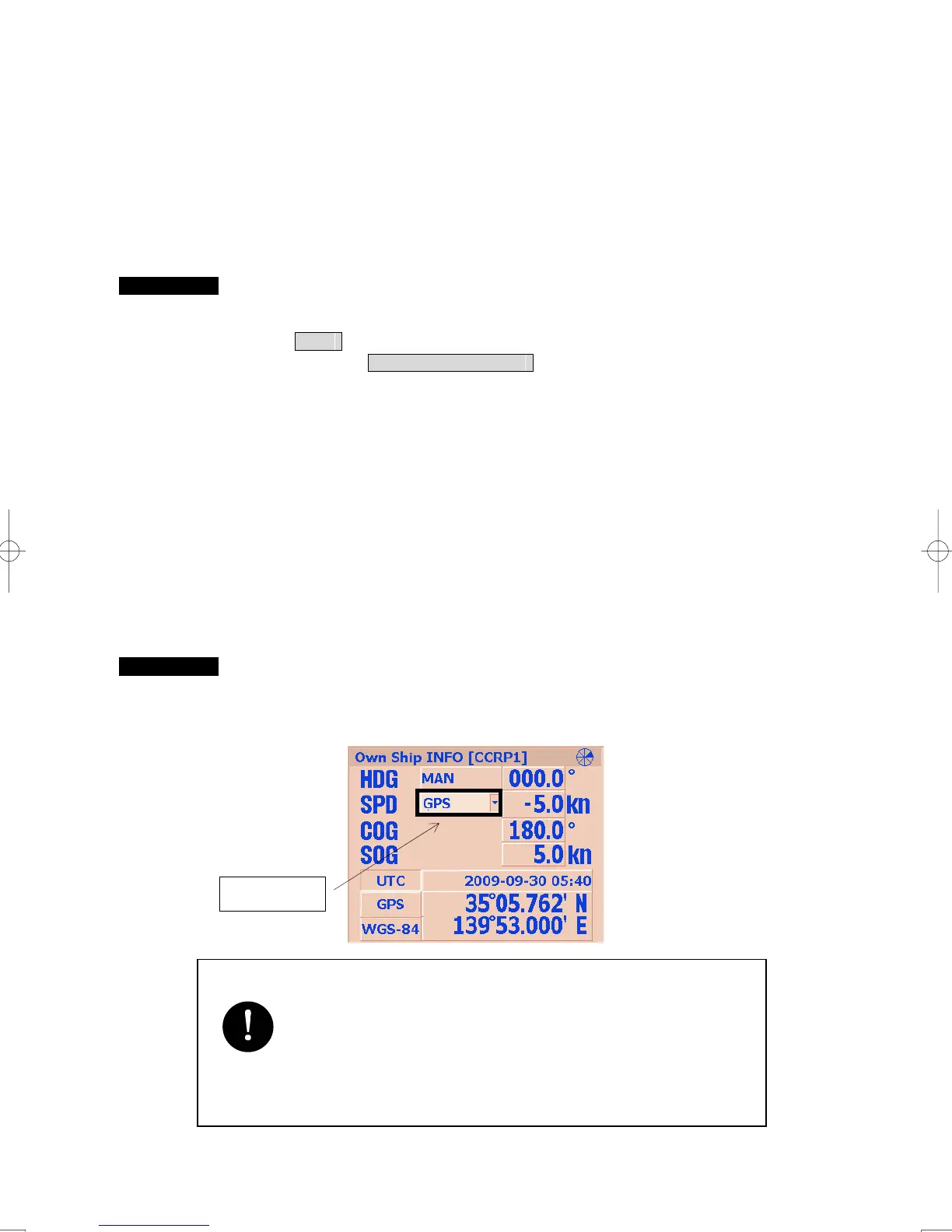
3.4.15 Set Own Ship Speed
3.4.15.1 Switch Own Ship Speed Device
Procedures 1 Left-click the own ship speed device button in the Own Ship Information
area located at the upper right of the display.
Select a speed device in the combobox.
Left-click