KMS MD35 manual
Version 4.16 36
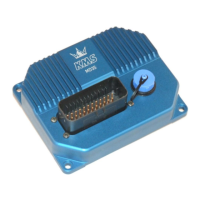
Lambda target map for a N/A engine Lambda target map for turbocharged engine
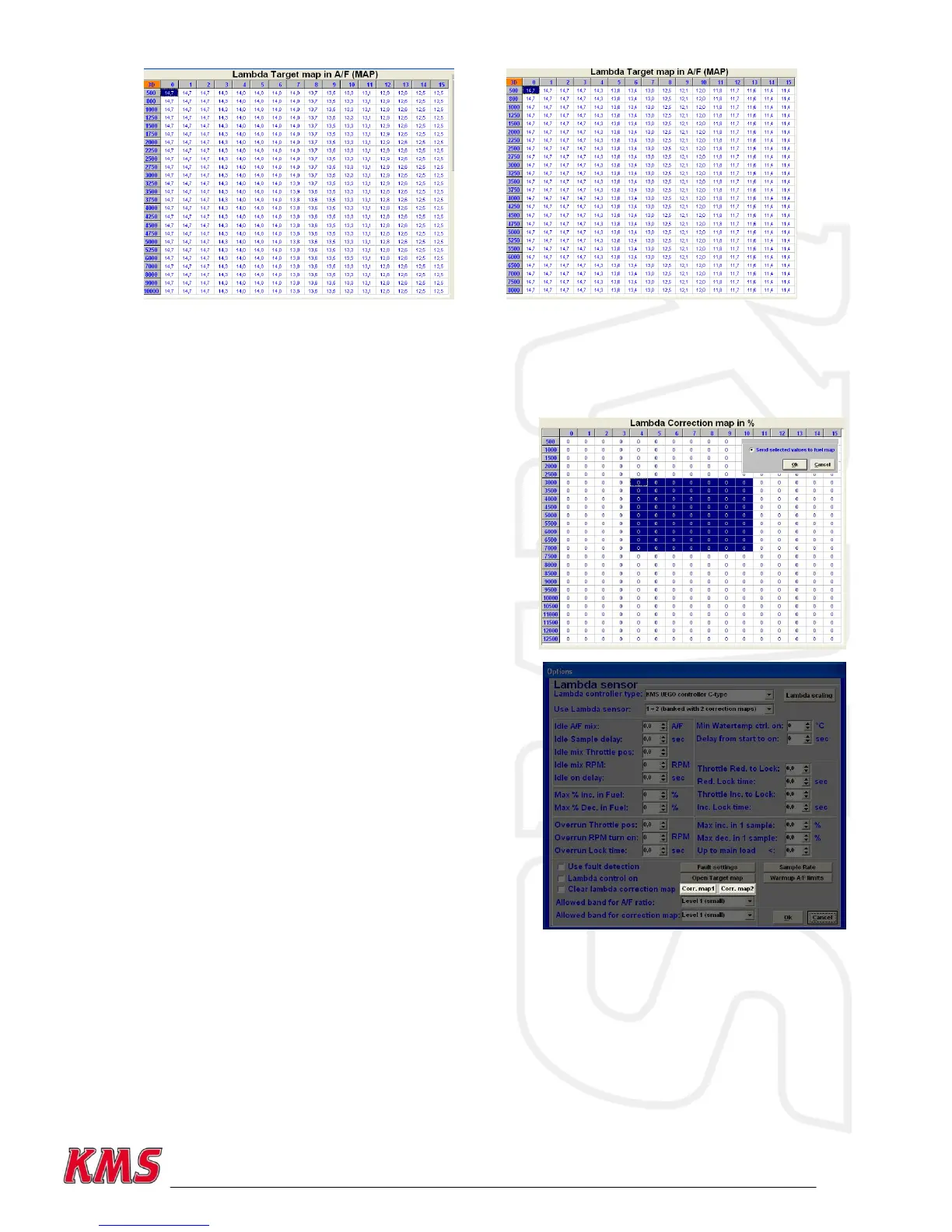
3.2.4.1.8.4 Correction map
The A/F ratio feedback control corrects injection times so that the target values (specified in the
target value map) are attained. The percentage that the
A/F ratio feedback control must correct in order to
realize the target values is recorded in a correction map.
The values recorded in the correction map can be
selected and send as a correction percentage to the
injection map. Thus the map can be adapted to minimize
percentage of the A/F ratio feedback control, which
ensures optimum driving characteristics. Make sure that
the engine runs smooth after the correction percentages
are send to the injection map. After the percentages
have been send to the injection map the entire
correction map needs to be reset to zero. Select the
control box „clear lambda correction map‟ and press „OK’
twice.
There are 2 correction maps to work with. Depending on
which lambda sensor(s) you have selected and the
specified correction on the selected injection group.
These correction maps will adjust the injection group;
corr.map1 injection group 1
corr.map2 injection group 2
There are some exceptions:
1 (with correction on injection group 2)
1 (correction on injection group 1 and 2)
By these settings only the corr.map1 will be available but
will also work on the second injection group.
Allowed band for A/F ratio:
Correction percentages are only recorded in the correction map if the A/F ratio value (lambda
value) comes within a specific range of the desired value. This range can be adjusted in two
settings. By choosing level 2, the correction value will be recorded in the correction map if the A/F
ratio feedback value comes within 0.2 of the target (with level 1 ≤ 0.1). With level 2, a 95%
accurate correction map is therefore created while a more precise one is created with level 1.
Recommended: Map the engine first on level 2. This way you can create the correction map faster.