4 — PROGRAMMABLE PARAMETERS
Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022 Return to TOC
pg. 144
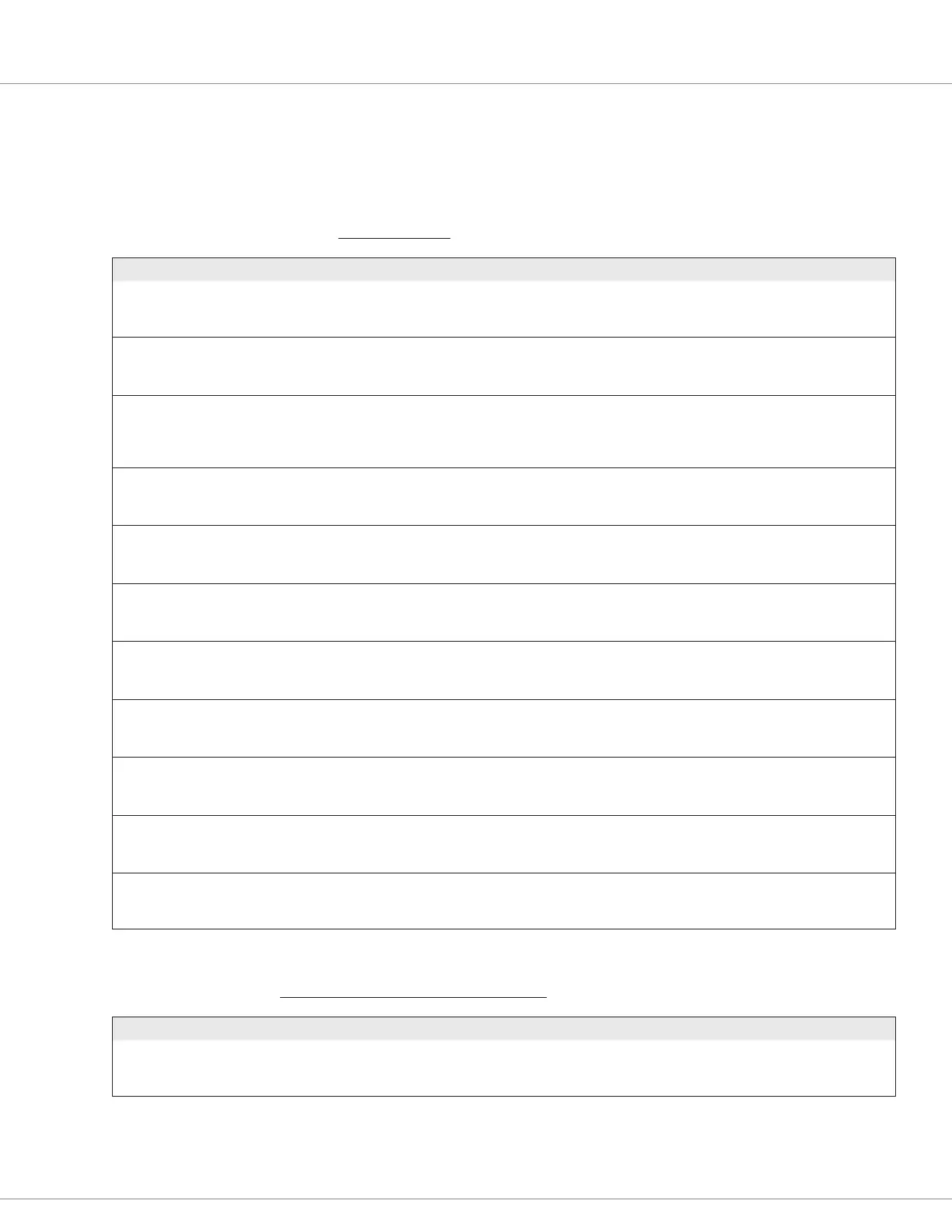
MOTOR SETUP — SIN/COS ENCODER MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Speed Filter Frequency
Speed_Filter_Frequency
0x3224 0x00
0.1 – 250.0 Hz
0.1 – 250
30.0 Hz Cutoff frequency for speed ltering. Note this value is now in
hertz, when updating from old versions you may need to divide by
2pi to get the exact performance.
Swap Motor Direction
Swap_Motor_Direction
0x362F 0x00
Off – On
0 – 1
Off Swaps the mechanical direction of motor spinning. If forward
throttle produces reverse direction change this parameter. This
parameter is critical for emergency reverse to work properly.
Enable Multiturn Sensor
Feedback_Multiturn
0x306D 0x00
0 – 1
0 – 1
0
[PCF]
Enable Multiturn Sensor = 0 (Off): One sensor cycle per
mechanical revolution. (Not using a multiturn encoder).
Enable Multiturn Sensor = 1 (On): One sensor cycle per electrical
cycle. (Using a multiturn encoder).
Sin Cos Fault Threshold
Sin_Cos_Fault_Threshold
0x3500 0x00
0.0 – 100.0 %
0 – 1000
10.0 % Controller compares expected and real angle from sine and
cosine inputs and faults if this threshold is exceeded. See Sin_
Difference and Cos_Difference.
Sin Cos fault Threshold High
Sin_Cos_Fault_Threshold_High
0x3502 0x00
0.0 – 100.0 %
0 – 1000
30.0 % Fault threshold used for a short time at startup to allow
adaptation algorithm to work. See Sin_Cos_Fault_Threshold.
Sin Cos Fault Time
Sin_Cos_Fault_Time
0x3503 0x00
10 – 1000 ms
10 - 1000
100 ms A Sin/Cos Sensor fault (ash code 0x36) will be generated if the
sensor is outside the conguration/tolerance by 10% or at/above
the supply rails for >100ms.
Sin Cos Startup Time
Sin_Cos_Startup_Time
0x306E 0x00
0 – 2000 ms
0 – 2000
1000 ms Time at startup for the sin/cos sensor to start producing valid
data. No sin/cos faults will be declared during this time but the
power section will not enable.
Sin Min
Feedback_Sin_Min
0x350F 0x00
0 – 32767
0 – 32767
0 Minimum output by the Sin/Cos sensor on the Sin channel. Input
detected at Position Feedback A. The value is set during the PMAC
motor commissioning procedure.
Sin Max
Feedback_Sin_Max
0x350E 0x00
0 – 32767
0 – 32767
0 Maximum output by the Sin/Cos sensor on the Sin channel. Input
detected at Position Feedback A. The value is set during the PMAC
motor commissioning procedure.
Cos Min
Feedback_Cos_Min
0x350C 0x00
0 – 32767
0 – 32767
0 Minimum output by the Sin/Cos sensor on the Cos channel. Input
detected at Position Feedback B. The value is set during the
PMAC motor commissioning procedure.
Cos Max
Feedback_Cos_Max
0x350B 0x00
0 – 32767
0 – 32767
0 Maximum output by the Sin/Cos sensor on the Cos channel.
Input detected at Position Feedback B. The value is set during the
PMAC motor commissioning procedure.
MOTOR SETUP – MOTOR SETUP STATUS MENU
Reference the Motor Setup Status menu on page 136.
MOTOR SETUP/ SIN/COS ENCODER — SPEED FILTER MENU
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Speed Filter Frequency
Speed_Filter_Frequency
0x3224 0x00
0.1 – 250 Hz
0.1 – 250
30.0 Hz Cutoff frequency for speed ltering. Note this value is now in
hertz, when updating from old versions you may need to divide by
2pi (3.14159) to get the exact performance.

 Loading...
Loading...







