V3F25/18 drive
Installation Instruction
© 2004 KONE Corporation AM-11.65.020
All rights reserved. 41 (42) (E) 2004-01-08
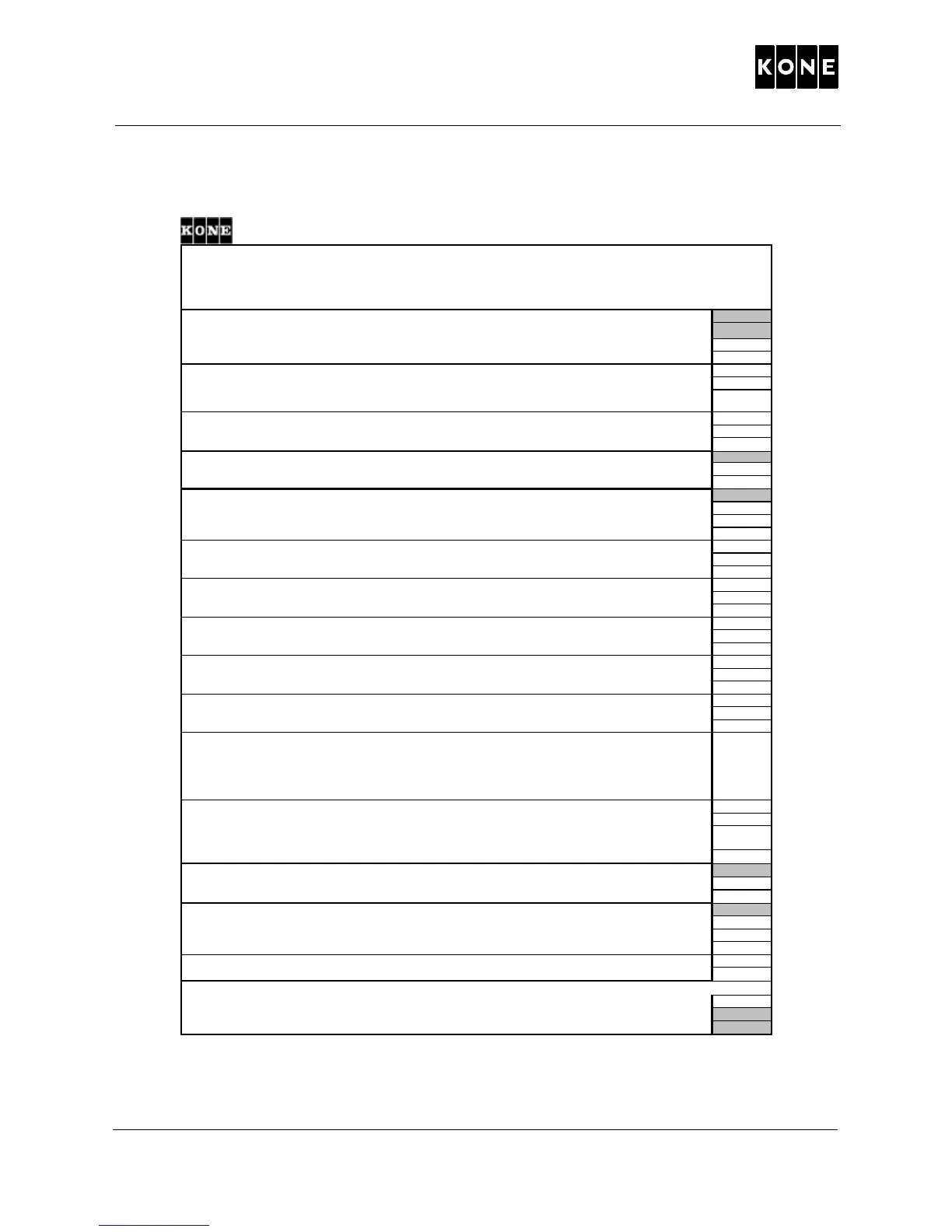
APPENDIX D. Parameter table 779980
V3F18/V3F25M Parameter Table
The document id of this sheet must
match with the id reported by LCE
menu 6_0.
This menu can be
used only when the
drive is in the
inspection mode !!
LCE
menu
unit range
Initial
value
Drive
settings
- document identification of the parameter set (= this sheet)
6_0 2011
2011
6_1 10, 18, 20, 32 18
6_2 m/s 0,5, ..., 3,5 2,5
6_3 kg 400, ..., 7 000 630
- roping (roping system that reduce car speed by 1x, 2x or 4x)
6_4 1, 2, 4 2
6_5 1, 2 2
6_6 Nm/A 5,0, ..., 150,0 29,7
- traction sheave diameter (determines resolver scaling)
6_7 mm 480, ..., 750 650
6_8 mm 37,50, 55,00, 75,00 75,00
NOTE! MXTORQ and TAC are read only values !
6_9 V 0,000, ..., 5,000 2,344
6_10 V -2,350, ..., -7,450 -3,572
6_20 s/m 0,0, ..., 15,9 5,0
6_21
m/s
2
0,3, ..., 1,2 0,8
- inspection speed (= elevator speed in inspection or RDF mode)
6_22 m/s 0,3, 0,5 0.3
6_23 0,15, ..., 1,00 0,50
6_24 m/s 0,01, ..., 0,05 0,03
- ADO speed (speed level supervision for ADO and relevelling operation)
6_25 m/s 0,20, ..., 0,70 0,50
6_26 sec 0,05, ..., 1,00 0,20
6_27 0,50, ..., 1,10 1,00
6_28 -0,30, ..., 0,30 0,00
- KTW/Q factor (= total moving masses / elevator load)
6_29 0,4, ..., 7,0 2,8
6_30 kg/m -2,0, ..., 7,0 0,0
6_31 kg/m 0,00, ..., 5,00 0,00
- final jerk distance (= additional distance used for final jerk)
6_32 mm 0, ..., 250 125
6_33 mm 0, ..., 20 0
6_34 0,400, ..., 0,900 0,900
- tacho fault counter (0=off, nn=tacho fault counter limit to stuck the drive)
6_35 0, ..., 10 0
6_36 ms 0, ..., 40 0
6_37 s 0,01, ..., 1,00 0,25
6_38 0, ..., 13 10
6_39 1, 2 1
6_40 1,66, ..., 3,33 2,50
6_41 A/V 40, ..., 80 60,0
6_42 mm 50, ..., 500 150
6_60 10, 12, 19 12
6_61 ° ele 0, ..., 360 0
Commissioning and tests
NOTE! Traction and buffer tests are valid for one start only.
- Resolver AutoDetect (resolver angle automatic tuning)
6_70 0, 1 0
6_71 -1,500, ..., 1,500 0
6_72 0, 1 0
6_73 0, 1 0
- enable LWD setup (-1 = clear setup, 0 = empty car, nnn = load in kg)
6_74 kg -1, 7 000 0
Permanent Store
NOTE! Set resolver angle (6_61) to 0 before downloading initial settings (6_98).
Whenever initial settings are downloaded, make power break !
- initial settings
6_98 0, 1 0
- save (saves parameters into permanent memory)
6_99 0, 1 0
Copyright (C) 1999 KONE Corporation. All rights reserved.
- tacho pulley diameter (37.5mm, 55 mm or 75.mm)
- MXTORQ (maximum torque voltage)
- TAC (tacho test voltage)
Elevator depedendent values
- elevator load (car nominal load in kilos)
- current sensor scaling (= 40A module wire 2 times thru, 80A
module wire 1 time thru)
- Ktc factor (torque vs current from the motor label)
- Motor type (MX10,MX18, MX20, MX32)
- nominal speed (of the elevator)
- start torque scaling
- balancing error
- rope weight
Additional parameters:
- P factor (= proportional gain of speed controller)
- acceleration (determines also jerk)
- speed reduction (= reduced speed / nom. speed)
- Resolver type (1=1x resolver, 2=2x resolver)
- torque scaling (=max torque / nominal torque)
- enable line bridge / safety relay supervision (exists)
yes no
not used 10 0
except half speed or correction drive 11 1
except correction drive 12 2
used all the time 13 3
- enable buffer test
- CM scaling (= current measurement scaling: 100A module uses
80A/V, others 60A/V.)
- vane length (= mechanical length of 61 vanes)
Machinery Parameters:
- number of pole pairs
- enable traction test
779980.XLS
- resolver angle
- motor torque measurement
- car cable weight
- relevelling correction distance
- relevelling speed
- tacho scaling factor
- tacho filter time
- I factor (= integration time of speed controller)
- start delay (= brake open command -> speed ref.)