- 16 -
- 17 -
KVM6000
Function Code Table
KVM6000
Function Code Table
0009HP0-09
Digital
setting of
auxiliary
source Y
frequency
0.01~Maximum output frequency
P0-10
P0-11
P0-12
P0-13
P0-17
P0-15
P0-18
Source of
frequency
upper limit
selection
Acceleration
time 1
Acceleration/
Deceleration
time unit
Maximum output
frequency
Source of
frequency
upper limit
digital setting
Source of
frequency
lower limit
digital setting
Stopping
method
000AH
000BH
000CH
000DH
000FH
0011H
0012H
Carrier
frequency
0.00~320.00Hz
0: Set by P0-12 1: AI1 2: AI2 3: AI3
4: Terminal pulse setting
5: RS485 Communication setting
0.1~6500.0s
P0-12~P0-10
0: 0.1s
1: 0.01s
0: Ramp to stop
1: Coast to stop
0~frequency upper limit
50.00Hz
50.00Hz
0
50.00Hz
0.00Hz
P0-14
Frequency
lower limit
run mode
000EH
0: Stop
1: Run at frequency lower limit
2: Run at zero speed
1
Model
dependent
0
1
Rotation
direction
selection
P0-190013H
BIT0:
0: Forward direction operation
1: Reverse direction operation
BIT1:
0: Reverse operation enable
1: Reverse operation disable
0000
P0-201.0~15.0KHz
0014H
Model
dependent
P0-16
Deceleration
time 1
0010H
0.1~6500.0s
Model
dependent
Carrier
frequency
accuracy unit
P0-21
0:0.1Hz
1:0.01Hz
0015H
2
P0-22
Reserved
0016H
P0-23
Restore default
setting
0017H
-
0:No operation
1:Data locked
2:Reset Error message
3~6:Undefined
7:Initialization setting—User data reset
10:Back up current user parameters
210:Restore user backup parameters
-
0~210
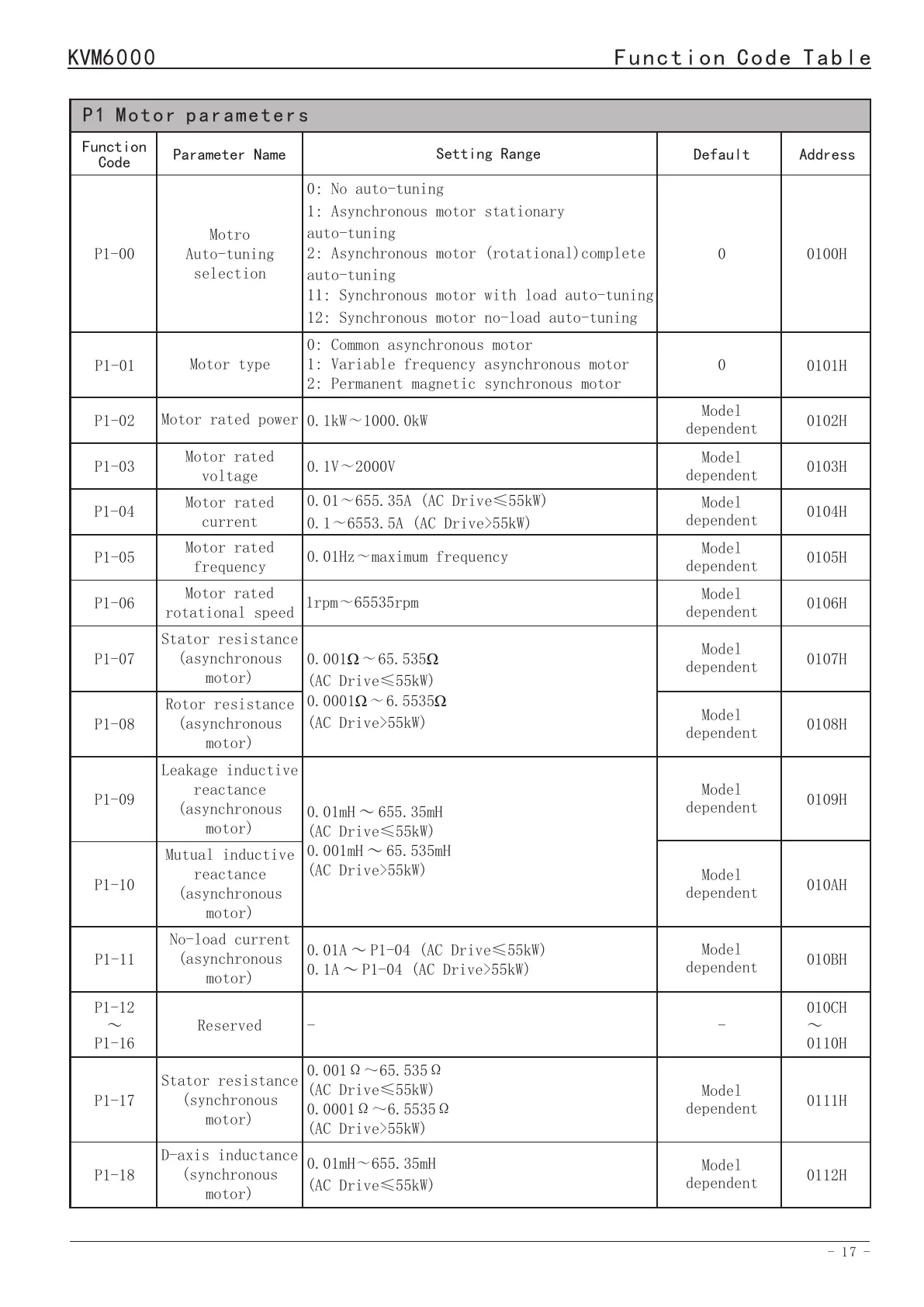
P1 Motor parameters
Setting Range
Function
Code
Parameter Name
Address
Default
P1-00
Motro
Auto-tuning
selection
0100H
0:No auto-tuning
1:Asynchronous motor stationary
auto-tuning
2:Asynchronous motor (rotational)complete
auto-tuning
11:Synchronous motor with load auto-tuning
12:Synchronous motor no-load auto-tuning
0
P1-01
Motor type
0101H
0: Common asynchronous motor
1: Variable frequency asynchronous motor
2: Permanent magnetic synchronous motor
0
P1-02
Motor rated power
0102H
0.1kW~1000.0kW
Model
dependent
P1-03
Motor rated
voltage
0103H
0.1V~2000V
Model
dependent
P1-04
Motor rated
current
0104H
0.01~655.35A (AC Drive≤55kW)
0.1~6553.5A (AC Drive>55kW)
Model
dependent
P1-05
Motor rated
frequency
0105H
0.01Hz~maximum frequency
Model
dependent
P1-06
Motor rated
rotational speed
0106H
1rpm~65535rpm
Model
dependent
P1-07
Stator resistance
(asynchronous
motor)
0107H
0.001Ω~65.535Ω
(AC Drive≤55kW)
0.0001Ω~6.5535Ω
(AC Drive>55kW)
Model
dependent
P1-08
Rotor resistance
(asynchronous
motor)
0108H
Model
dependent
P1-09
Leakage inductive
reactance
(asynchronous
motor)
0109H
0.01mH~655.35mH
(AC Drive≤55kW)
0.001mH~65.535mH
(AC Drive>55kW)
Model
dependent
P1-10
010AH
Model
dependent
Mutual inductive
reactance
(asynchronous
motor)
P1-11
No-load current
(asynchronous
motor)
010BH
0.01A~P1-04 (AC Drive≤55kW)
0.1A~P1-04 (AC Drive>55kW)
Model
dependent
P1-12
~
P1-16
P1-17
Reserved
Stator resistance
(synchronous
motor)
010CH
~
0110H
0111H
-
0.001Ω~65.535Ω
(AC Drive≤55kW)
0.0001Ω~6.5535Ω
(AC Drive>55kW)
-
Model
dependent
P1-180112H
0.01mH~655.35mH
(AC Drive≤55kW)
Model
dependent
D-axis inductance
(synchronous
motor)
 Loading...
Loading...