- 18 -
- 19 -
KVM6000
Function Code Table
KVM6000
Function Code Table
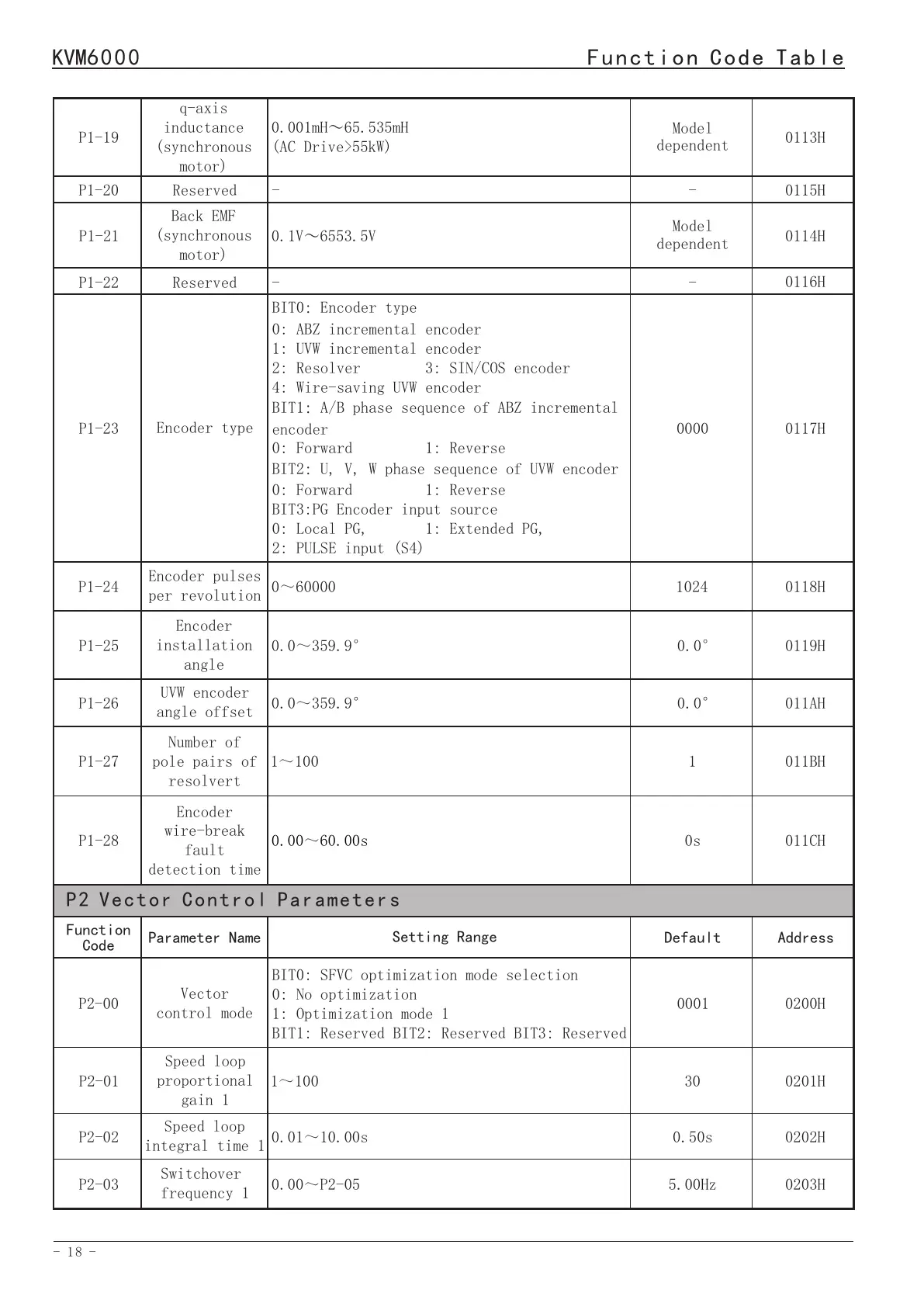
P1-19
P1-20
P1-21
P1-22
q-axis
inductance
(synchronous
motor)
Reserved
Back EMF
(synchronous
motor)
Reserved
0113H
0115H
0114H
0116H
0.1V~6553.5V
-
-
Model
dependent
-
-
0117H
0118H
0119H
011AH
011BH
011CH
0000
1024
0.0°
1
0s
0.0°
P1-23
P1-24
P1-25
P1-26
P1-27
P1-28
Encoder type
Encoder pulses
per revolution
Encoder
wire-break
fault
detection time
Encoder
installation
angle
UVW encoder
angle offset
Number of
pole pairs of
resolvert
BIT0:Encoder type
0: ABZ incremental encoder
1: UVW incremental encoder
2: Resolver 3: SIN/COS encoder
4: Wire-saving UVW encoder
BIT1:A/B phase sequence of ABZ incremental
encoder
0: Forward 1: Reverse
BIT2:U, V, W phase sequence of UVW encoder
0: Forward 1: Reverse
BIT3:PG Encoder input source
0: Local PG, 1: Extended PG,
2: PULSE input (S4)
0~60000
0.0060.00s~
0.0~359.9°
0.0~359.9°
1~100
Model
dependent
P2 Vector Control Parameters
P2-00
P2-01
P2-02
P2-03
Function
Code
Vector
control mode
Speed loop
proportional
gain 1
Speed loop
integral time 1
Switchover
frequency 1
Parameter Name
BIT0: SFVC optimization mode selection
0: No optimization
1: Optimization mode 1
BIT1: Reserved BIT2: Reserved BIT3: Reserved
1~100
0.01~10.00s
0.00~P2-05
Setting Range
0001
30
0.50s
5.00Hz
Default
0200H
0201H
0202H
0203H
Address
0.001mH~65.535mH
(AC Drive>55kW)
Slip
compensation
factor
P2-04
P2-05
P2-06
P2-07
P2-08
P2-09
P2-10
Speed loop
integral time 2
Speed loop
proportional
gain 2
Switchover
frequency 2
Time constant
of speed loop
filter
Vector control
over-excitation
gain
Torque upper
limit source
in speed
control mode
0.01~10.00s
1~100
P2-03~maximum frequency
50~200%
0.000~0.100s
0~200
0: P2-11 function code setting
1: AI1 2: AI2 3: AI3
4: Pulse setting
5: Communication setting
6:MIN(AI1,AI2) 7:MAX(AI1,AI2)
20
1.00s
10.00Hz
100%
0.01s
64
0
0204H
0205H
0206H
0207H
0208H
0209H
020AH
150.0%
-
-
2000
1300
2000
1300
P2-11
P2-12
P2-13
P2-14
P2-15
P2-16
P2-17
020BH
020CH
020DH
020EH
020FH
0210H
0211H
0.0~200.0%
-
-
0~60000
Digital setting
of torque
upper limit
Reserved
Current loop
of M-axis Kp
Current loop
of M-axis Ki
Current loop
of T-axis Kp
Current loop
of T-axis Ki
Reserved
0
P2-180212H
Speed loop
integral
property
0: Invalid
1: Valid
P2-19
Field weakening
mode of
synchronous
motor
0213H
0: No field weakening
1: Direct calculation
2: Automatic adjustment
1
P2-20
P2-21
50~500%
1~300%
100%
50%
0214H
0215H
Field weakening
gain of
synchronous
motor
Maximum field
weakening
current
 Loading...
Loading...