- 34 -
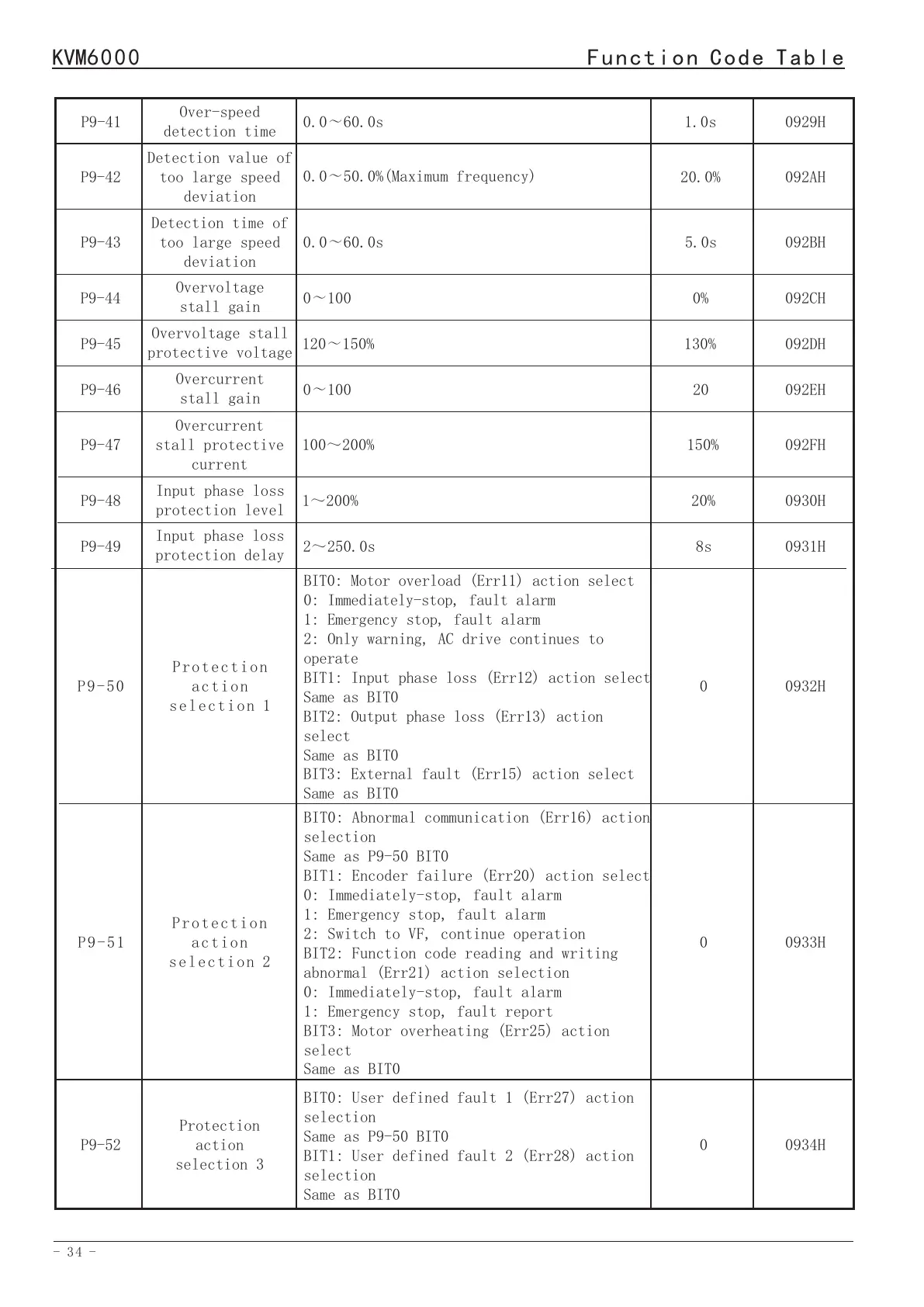
0.0~60.0s
P9-41
Over-speed
detection time
1.0s
0929H
0.0~50.0%(Maximum frequency)
P9-42
Detection value of
too large speed
deviation
20.0%
092AH
0.0~60.0s
P9-43
Detection time of
too large speed
deviation
5.0s
092BH
0~100
P9-44
Overvoltage
stall gain
0%092CH
120~150%
P9-45
130%
092DH
Overvoltage stall
protective voltage
0~100
P9-46
Overcurrent
stall gain
20092EH
P9-47
P9-48
P9-49
100~200%
1~200%
2~250.0s
BIT0: Motor overload (Err11) action select
0: Immediately-stop, fault alarm
1: Emergency stop, fault alarm
2: Only warning, AC drive continues to
operate
BIT1: Input phase loss (Err12) action select
Same as BIT0
BIT2: Output phase loss (Err13) action
select
Same as BIT0
BIT3: External fault (Err15) action select
Same as BIT0
BIT0: Abnormal communication (Err16) action
selection
Same as P9-50 BIT0
BIT1: Encoder failure (Err20) action select
0: Immediately-stop, fault alarm
1: Emergency stop, fault alarm
2: Switch to VF, continue operation
BIT2: Function code reading and writing
abnormal (Err21) action selection
0: Immediately-stop, fault alarm
1: Emergency stop, fault report
BIT3: Motor overheating (Err25) action
select
Same as BIT0
092FH
0930H
0931H
0932H
0933H
150%
20%
8s
0
0
P9-50
P9-51
Overcurrent
stall protective
current
Input phase loss
protection level
Input phase loss
protection delay
Protection
action
selection 1
Protection
action
selection 2
- 35 -
KVM6000
Function Code Table
KVM6000
Function Code Table
P9-52
Protection
action
selection 3
00934H
BIT0: User defined fault 1 (Err27) action
selection
Same as P9-50 BIT0
BIT1: User defined fault 2 (Err28) action
selection
Same as BIT0
BIT2: Power on time arrival (Err29) action
selection
Same as BIT0
BIT3: Load loss (Err30) action selection
0: Immediately-stop, fault alarm
1: Emergency stop, fault alarm
2: Directly jump to 7% of the rated frequency
of the motor to continue operation, and
automatically return to the set frequency
operation during noload operation
P9-52
Protection
action
selection 3
00934H
BIT0: Loss of PID feedback during operation
(Err31) action selection
Same as PB-01 BIT0
BIT1: Excessive speed deviation (Err42) action
selection
Same as BIT0
P9-53
Protection
action
selection 4
00935H
PA Process PID control parameters
BIT0: Loss of PID feedback during operation
(Err31) action selection
Same as PB-01 BIT0
BIT1: Excessive speed deviation (Err42)
action selection
Same as BIT0
BIT2: Motor over speed (Err43) action
selection
Same as BIT0
BIT3: Initial position error (Err51) action
selection
Same as BIT0
BIT0: Speed feedback error (Err52) action
selection
Same as PB-01 BIT0
BIT1: Reserved
BIT2: Reserved
BIT3: Reserved
0: PID setting source
1: AI1 2: AI2 3: AI3
4: Terminal pulse setting(PUL)
5: Communication setting
6: PLC setting 7:Option card
8: UP/DW control 9: Terminal selection
0.00~100.0%
Setting Range
0935H
0936H
0A00H
0A01H
Address
0
0
0
50.0%
Default
P9-53
P9-54
PA-00
PA-01
Function
Code
Protection
action
selection 4
Protection
action
selection 5
PID setting
source
PID digital
setting
Parameter Name
0: PID setting source 1: AI1 2: AI2
3: AI3 4: Terminal pulse feedback
5: Communication feedback
6: AI1 + AI2 7:MAX(|AI1|,|AI2|)
8:MIN(|AI1|,|AI2|) 9: Option card
0.00~100.0%
0A02H
0A03H
2
100.0%
PA-02
PA-03
PID control
feedback
signal source
PID digital
feedback
 Loading...
Loading...