- 36 -
- 37 -
KVM6000
Function Code Table
KVM6000
Function Code Table
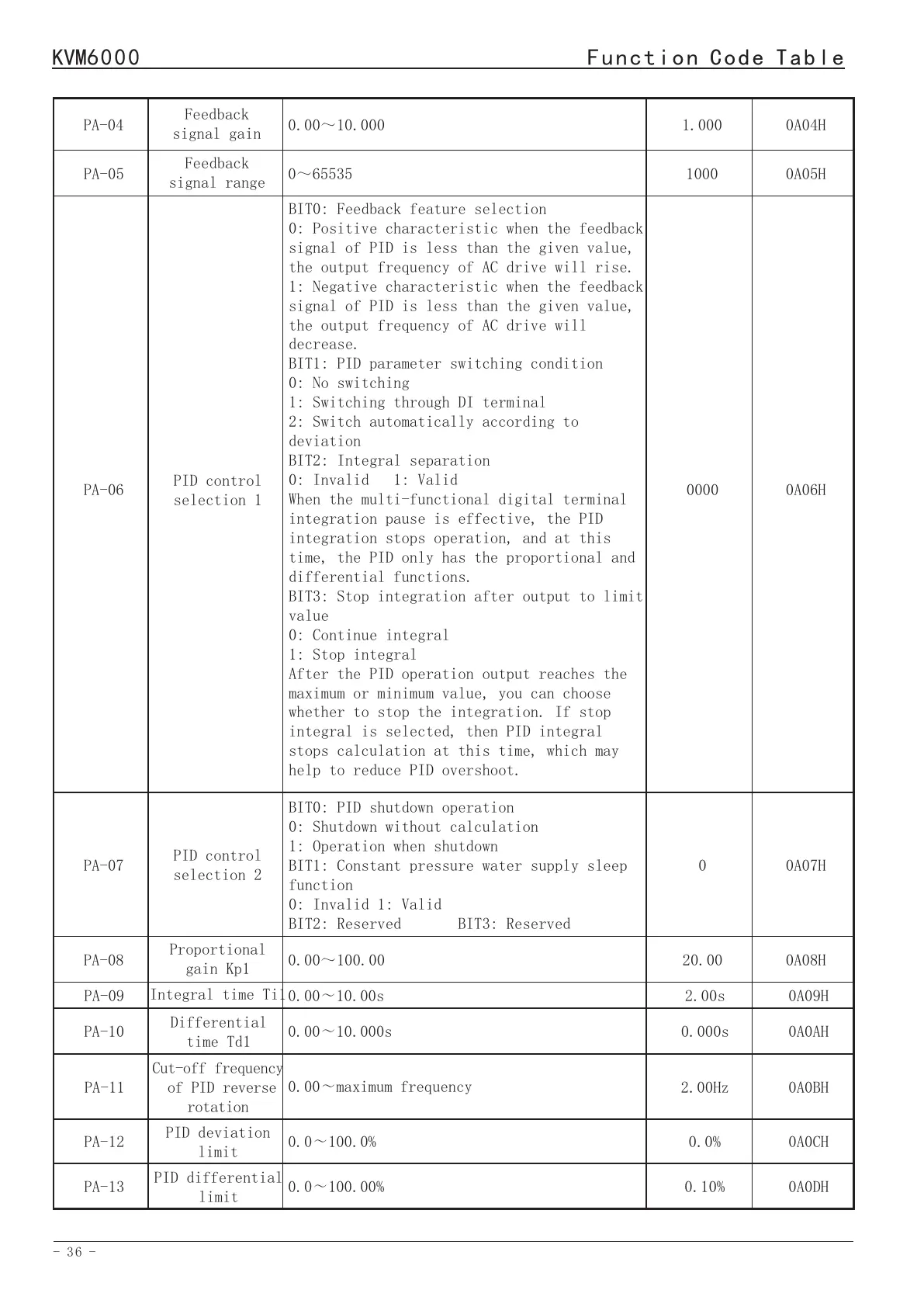
Feedback
signal gain
Feedback
signal range
0.00~10.000
0~65535
0A04H
0A05H
1.000
1000
PA-04
PA-05
PA-060A06H
0000
PID control
selection 1
BIT0: Feedback feature selection
0: Positive characteristic when the feedback
signal of PID is less than the given value,
the output frequency of AC drive will rise.
1: Negative characteristic when the feedback
signal of PID is less than the given value,
the output frequency of AC drive will
decrease.
BIT1: PID parameter switching condition
0: No switching
1: Switching through DI terminal
2: Switch automatically according to
deviation
BIT2: Integral separation
0: Invalid 1: Valid
When the multi-functional digital terminal
integration pause is effective, the PID
integration stops operation, and at this
time, the PID only has the proportional and
differential functions.
BIT3: Stop integration after output to limit
value
0: Continue integral
1: Stop integral
After the PID operation output reaches the
maximum or minimum value, you can choose
whether to stop the integration. If stop
integral is selected, then PID integral
stops calculation at this time, which may
help to reduce PID overshoot.
PA-070A07H
0
BIT0: PID shutdown operation
0: Shutdown without calculation
1: Operation when shutdown
BIT1: Constant pressure water supply sleep
function
0: Invalid 1: Valid
BIT2: Reserved BIT3: Reserved
PID control
selection 2
PA-080A08H
20.00
0.00~100.00
Proportional
gain Kp1
0.00~10.00s
PA-09
Integral time Ti1
2.00s
0A09H
0.00~10.000s
PA-10
Differential
time Td1
0.000s
0A0AH
0.00~maximum frequency
PA-11
Cut-off frequency
of PID reverse
rotation
2.00Hz
0A0BH
0.0~100.0%
PA-12
PID deviation
limit
0.0%
0A0CH
0.0~100.00%
PA-13
PID differential
limit
0.10%
0A0DH
0.00~650.00s
PA-14
PID setting
change time
0.00s
0A0EH
0.00~60.00s
PA-15
PID feedback
filter time
0.00s
0A0FH
0.00~60.00s
PA-16
PID output
filter time
0.00s
0A10H
-
PA-17
Reserved
-
0A11H
0.00~100.00
PA-18
Proportional
gain Kp2
20.00
0A12H
0.00~10.00s
PA-19
Integral
time Ti2
2.00s
0A13H
0.00~10.000s
PA-20
Differential
time Td2
0.000s
0A14H
0.0~PA-22
PA-21
PID parameter
switchover
deviation 1
20.0%
0A15H
PA-22
PID parameter
switchover
deviation 2
PA-21~100.0%
80.0%
0A16H
0.0~100.0%
PA-23
PID initial value
0%
0A17H
0.0~6500.0s
PA-24
PID
initial value
running time
0.0s
0A18H
0.00~100.00%
PA-25
Maximum deviation
between two PID
outputs in forward
direction
1.00%
0A19H
0.00~100.00%
PA-26
Maximum deviation
between two PID
outputs in
reverse direction
1.00%
0A1AH
0.0~100.0%
PA-27
Detection value
of disconnection
alarm
0.0%
0A1BH
0.0~120.0s
PA-28
Feedback
disconnection
detection time
0.0%
0A1CH
0.1~100.0%
PA-29
Dormant judgment
benchmark
95.0%
0A1DH
0.0~6500.0S
PA-30
Dormant base
duration
30.0s
0A1EH
0.0~6500.0S
PA-31
Enter dormant
deceleration
time
60.0s
0A1FH
0.00~20.00Hz
PA-32
Sleep low holding
frequency
10.00Hz
0A20H
0.0~6500.0S
PA-33
Low frequency
operation time
10.0s
0A21H
0.1~100.0%
PA-34
Wake-up base
50.0%
0A23H
 Loading...
Loading...