The three Servo Motors give your robot the ability
to move. If you use the Move block in the
software to program your motors, the two motors
will automatically synchronize, so that your robot
will move in a straight line.
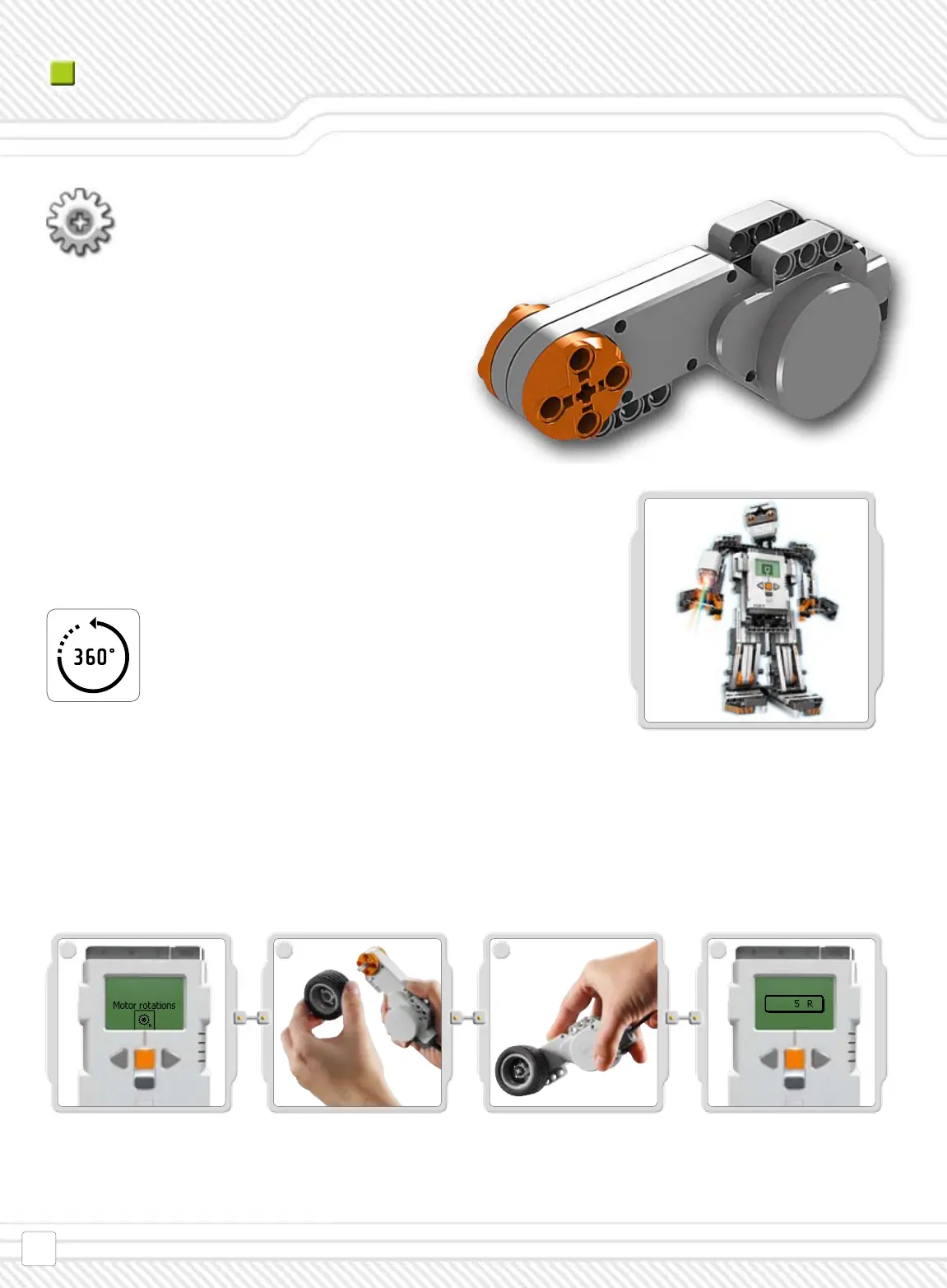
Select the Motor Rotations icon.
Select the port where you have
connected the motor.
Now attach a wheel to the motor and measure the rotations as you roll the wheel along the oor.
Test the built-in Rotation Sensor’s ability to measure distance:
Connect a motor to the NXT.
Select the View submenu in the NXT’s display.
The built-in Rotation Sensor in each
motor also lets you set different speeds
for your motors (by setting different
power parameters in the software). Try
running the motors at different speeds.
Each motor has a built-in Rotation Sensor. This lets
you control your robot’s movements precisely. The
Rotation Sensor measures motor rotations in degrees
or full rotations (accuracy of +/- one degree).
One rotation is equal to 360 degrees, so if you set a
motor to turn 180 degrees, its output shaft will make
half a turn.
Select the Try Me submenu on the NXT’s display and test your
motors. You’ll get a fun reaction.