72
S-Curve Characteristic
at Dec. Start
S-Curve Characteristic
at Dec. End
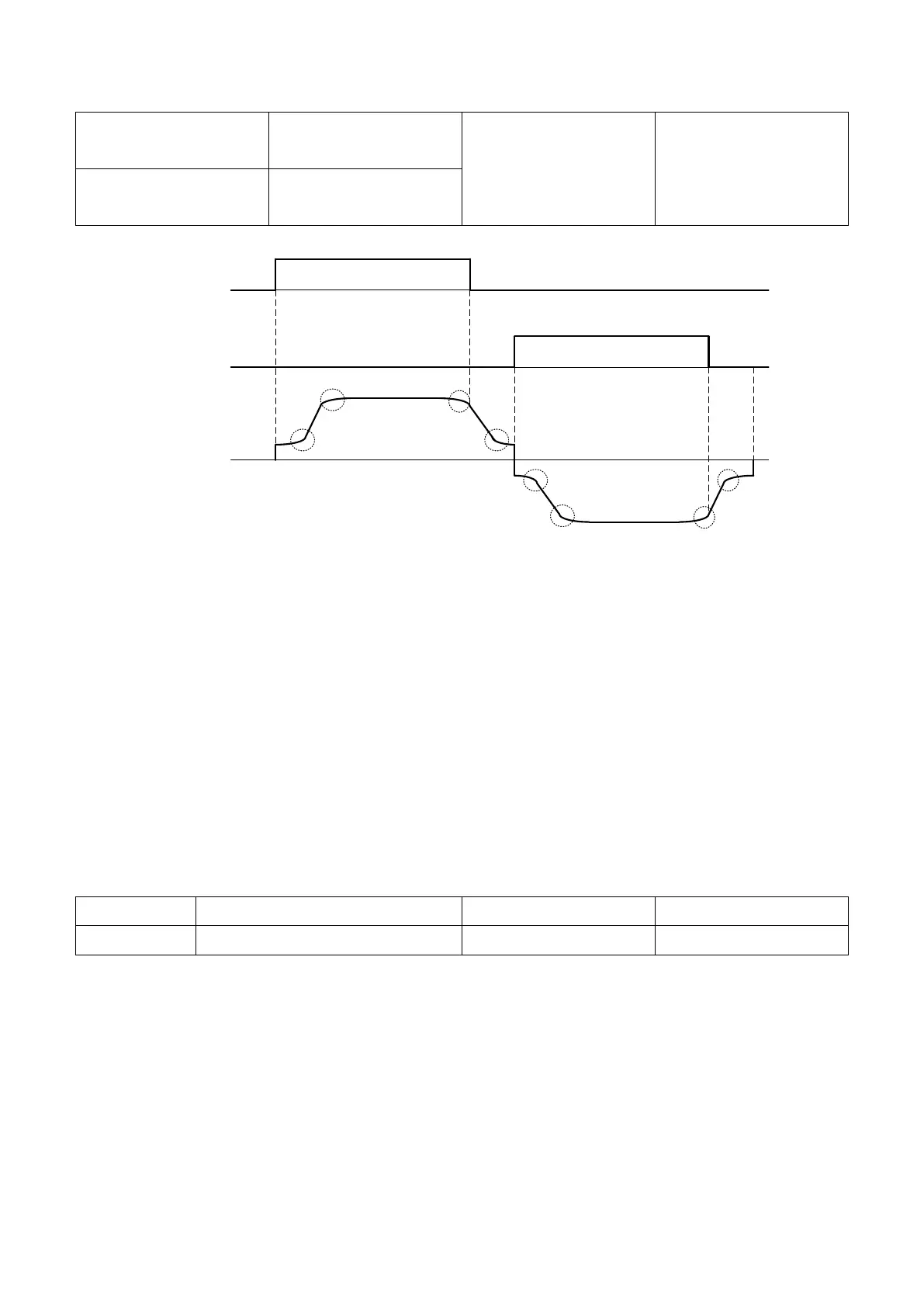
S-curve characteristics are illustrated below.
Forward
Reverse
Output
Frequency
ON
ON
OFF
OFF
C2-00
C2-01 C2-02
C2-03
C2-00
C2-01 C2-02
C2-03
Figure 6.23 S-Curve Characteristics during Forward and Reverse
Setting the S-curve will increase the actual acceleration and deceleration times.
Actual acceleration time= acceleration time setting+(C2-00+C2-01) / 2
Actual deceleration time=deceleration time setting +(C2-02+C2-03) / 2
C3 Torque Compensation
The torque compensation is to enlarge the torque by increasing the output voltage when
larger load is applied. The drive detects the increased amount of the load by the output
current and adjusts the control with higher output voltage.
Note: Check if the motor parameters and the V/F pattern are set correctly before setting the torque compensation.
C3-00 Torque Compensation Gain
Sets the gain for the motor 1 Torque compensation.
□ Torque Compensation in Closed-Loop and Open-Loop V/F Control
The drive calculates the voltage loss on the output side using the output voltage and the
d2-04 (Motor Line-to-Line Resistance) value, and improves the torque when it is insufficient
during start or running at low speed.
Compensation voltage=Motor primary voltage loss x C3-00.
□ Torque Compensation in Sensorless Voltage Vector Control (SVVC)