58
Chapter 6 Troubleshooting
6.1 Displaying exception and solutions
All possible fault types for MV600L are summarized as shown in table 6-1. Before consulting the service
department, the user can perform self-check according to the hints of the table and record the fault symptoms
in detail. To seek for service support, please contact the sales person.
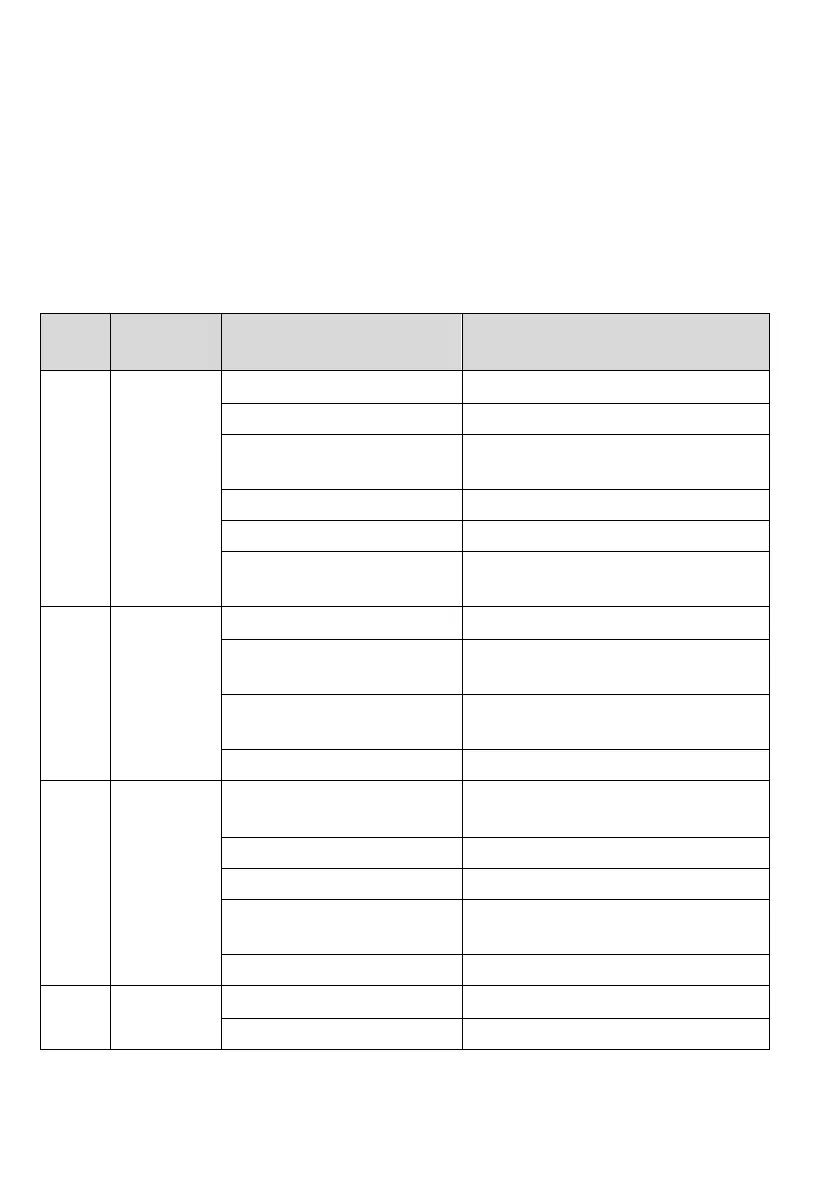
Table 6-1 Fault record table
Fault
code
Fault type Possible fault cause Solutions
Er.oC1
Acceleration
over-current of
the drive
The acceleration time is too short. Lengthen the acceleration time
The motor parameters are incorrect. Perform the parameter auto-tuning of the motor
When instantaneous stop happens,
restart the rotating motor
Set the start mode P08.00 as the speed tracking
restart function
PG fault occurs when it is running Check the PG and its wiring
The drive power is too low. Adopt the drive with high power class
V/F curve is improper.
Adjust the V/F curve setting and the manual torque
increase
Er.oC2
Deceleration
over-current of
the drive
The deceleration time is too short. Lengthen the deceleration time
There is potential energy load or the
load inertial torque is large.
Use additionally appropriate dynamic braking
components
Encoder fault occurs when PG is
running
Check the encoder and its wiring
The drive power is low. Adopt the drive with high power class
Er.oC3
Constant speed
over-current of
the drive
The acceleration/deceleration time is
too short.
Lengthen the acceleration/deceleration time
appropriately
Sudden load change or abnormal load Check the load
Low grid voltage Check the input power supply
Encoder fault occurs when PG is
running
Check the encoder and its wiring
The drive power is low Adopt the drive with high power class
Er.oU1
Acceleration
over-voltage of
Abnormal input voltage Check the input power supply
Acceleration time is too short. Lengthen the acceleration time appropriately

 Loading...
Loading...