5(19)
Table 1. ND9000P GSD modules.
GSD mod-
ule name
control system output control system input
SP (short) bytes 1-4: SP.VALUE: Valve position
setpoint in AO block AUTO mode
(default mode), IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
none
SP (long) bytes 1-4: SP.VALUE: Valve position
setpoint, IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
none
RCAS_IN+
RCAS_OUT
bytes 1-4: RCAS_IN.VALUE: Valve
position setpoint in RCAS mode,
IEEE-754 float
byte 5: RCAS_IN.STATUS: The
status of the valve position setpoint.
Unsigned integer 8.
See table 2.
bytes 1-4:
RCAS_OUT.VALUE:
Feeds back the SP or
RCAS_IN, depending
on the mode, IEEE-754
float
byte 5:
RCAS_OUT.STATUS.
Unsigned integer 8.
See table 2.
SP+READB
ACK+POS_
D
bytes 1-4: SP.VALUE: Valve position
setpoint in AO block AUTO mode
(default mode), IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
bytes 1-4: READ-
BACK.VALUE: Valve
position measurement,
IEEE-754 float.
byte 5: READ-
BACK.STATUS: The
status of the valve
position measurement.
Unsigned integer 8.
See table 2.
byte 6: POS_D.VALUE:
Limit information from
the limit switches or
calculated from the
position sensor. Un-
signed integer 8. The
values are:
1 = closed
2 = opened
3 = intermediate
byte 7:
POS_D.STATUS:
Unsigned integer 8.
SP+CHECK
BACK
bytes 1-4: SP.VALUE: Valve position
setpoint in AO block AUTO mode
(default mode), IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
Bytes 1-3: CHECK-
BACK: diagnostic sig-
nal, bit-enumerated, 3
bytes. See table 3.
SP+READB
ACK+POS_
D+CHECKB
ACK
bytes 1-4: SP.VALUE: Valve position
setpoint in AO block AUTO mode
(default mode), IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
bytes 1-4: READ-
BACK.VALUE
byte 5: READ-
BACK:STATUS
byte 6: POS_D.VALUE
byte 7:
POS_D.STATUS
bytes 8-10: CHECK-
BACK
RCAS_IN+
RCAS_OUT
+CHECKBA
CK
bytes 1-4: RCAS_IN.VALUE: Valve
position setpoint in RCAS mode,
IEEE-754 float
byte 5: RCAS_IN.STATUS: The
status of the valve position setpoint.
Unsigned integer 8.
See table 2.
bytes 1-4:
RCAS_OUT.VALUE:
Feeds back the SP or
RCAS_IN, depending
on the mode, IEEE-754
float
byte 5:
RCAS_OUT.STATUS.
Unsigned integer 8.
GSD mod-
ule name
control system output control system input
bytes 6-8: CHECK-
BACK
SP+RIN+R
B+ROUT+P
OS_D+CB
bytes 1-4: SP.VALUE: Valve position
setpoint in AO block AUTO mode
(default mode), IEEE-754 float
byte 5: SP.STATUS: The status of
the valve position setpoint. Unsigned
integer 8. In normal case, use value
0x80. See table 2.
bytes 6-9: RCAS_IN.VALUE: Valve
position setpoint in RCAS mode,
IEEE-754 float
byte 10: RCAS_IN.STATUS: The
status of the valve position setpoint.
Unsigned integer 8.
See table 2.
bytes 1-4: READ-
BACK.VALUE
byte 5: READ-
BACK.STATUS
bytes 6-9:
RCAS_OUT.VALUE
byte 10:
RCAS_OUT.STATUS
byte 11:
POS_D.VALUE
byte 12:
POS_D.STATUS
bytes 13-15: CHECK-
BACK
The STATUS byte and the CHECKBACK mappings are
listed in the tables 2 and 3.
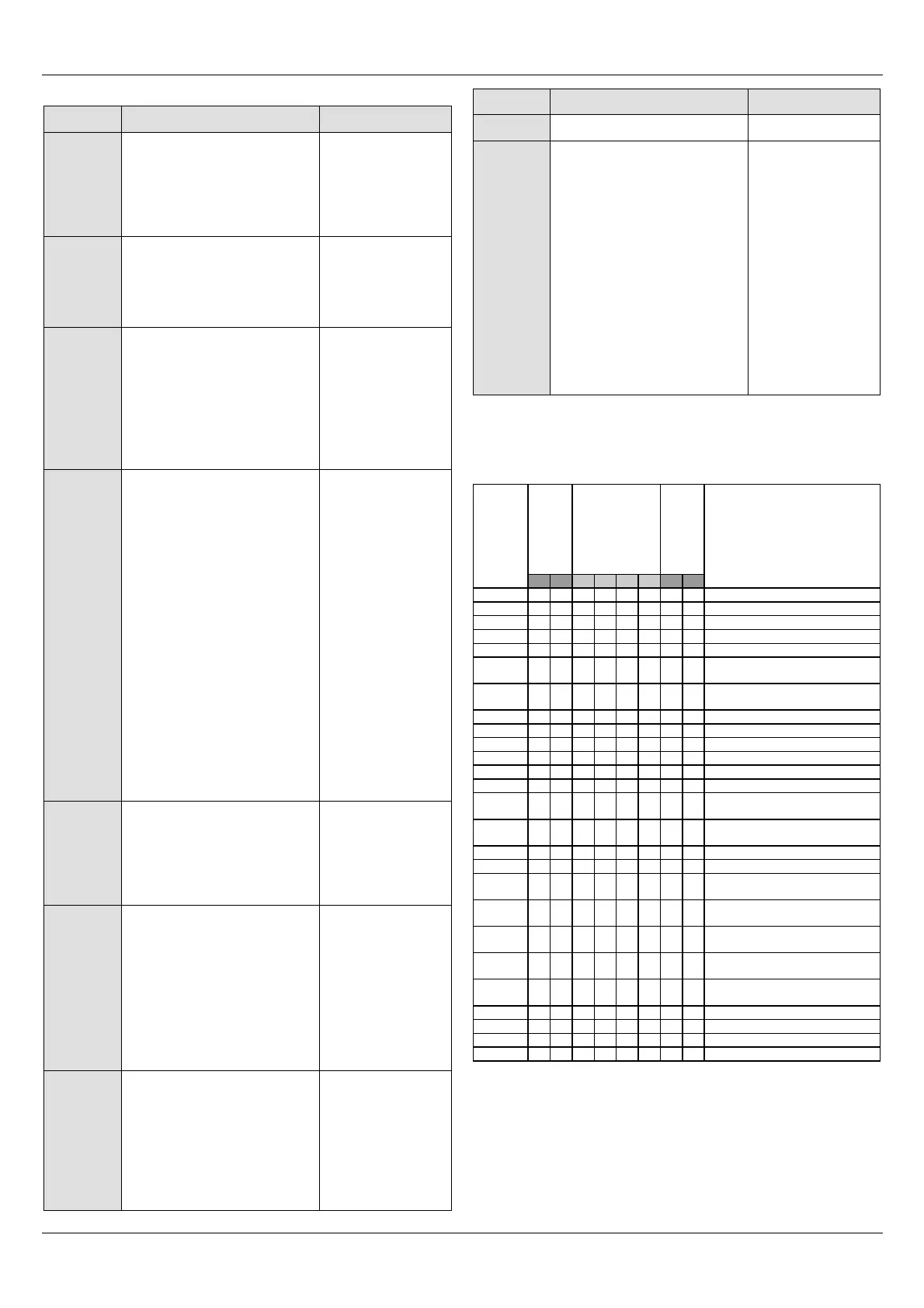
Table 2. Status byte mapping.
Status
byte in
case
that the
limit
bits are
zeros
Quali
ty
Bits
Additional
information
Bits
Limit
Bits
Meaning
7 6 5 4 3 2 1 0
0x00 0 0 0 0 0 0 x x bad
0x04 0 0 0 0 0 1 x x bad, configuration error
0x08 0 0 0 0 1 0 x x bad, not connected
0x0C 0 0 0 0 1 1 x x bad, device failure
0x10 0 0 0 1 0 0 x x bad, sensor failure
0x14 0 0 0 1 0 1 x x bad, no communication (last
usable value)
0x18 0 0 0 1 1 0 x x bad, no communication (no
usable value)
0x1C 0 0 0 1 1 1 x x bad, out of service
0x40 0 1 0 0 0 0 x x uncertain
0x44 0 1 0 0 0 1 x x uncertain, last usable value
0x48 0 1 0 0 1 0 x x uncertain, substituted value
0x4C 0 1 0 0 1 1 x x uncertain, initial value
0x80 1 0 0 0 0 0 x x good
0x84 1 0 0 0 0 1 x x good, Update event (change of
parameters)
0xA0 1 0 1 0 0 0 x x good, go into failsafe position
(command)
0xA4 1 0 1 0 0 1 x x good, maintenance required
0xC0 1 1 0 0 0 0 x x good (cascade)
0xC4 1 1 0 0 0 1 x x good (cascade), initialization
confirmed
0xC8 1 1 0 0 1 0 x x good (cascade), initialization
requested
0xCC 1 1 0 0 1 1 x x good (cascade), rcas mode not
requested
0xD8 1 1 0 1 1 0 x x good (cascade), local operation
has priority
0xE0 1 1 1 0 0 0 x x good (cascade), go into failsafe
position (command)
x x x x x x 0 0 value is not limited
x x x x x x 0 1 value is low limited
x x x x x x 1 0 value is high limited
x x x x x x 1 1 value is constant
x = could be any (0 or 1)