7.8 Recovery with JamSynch
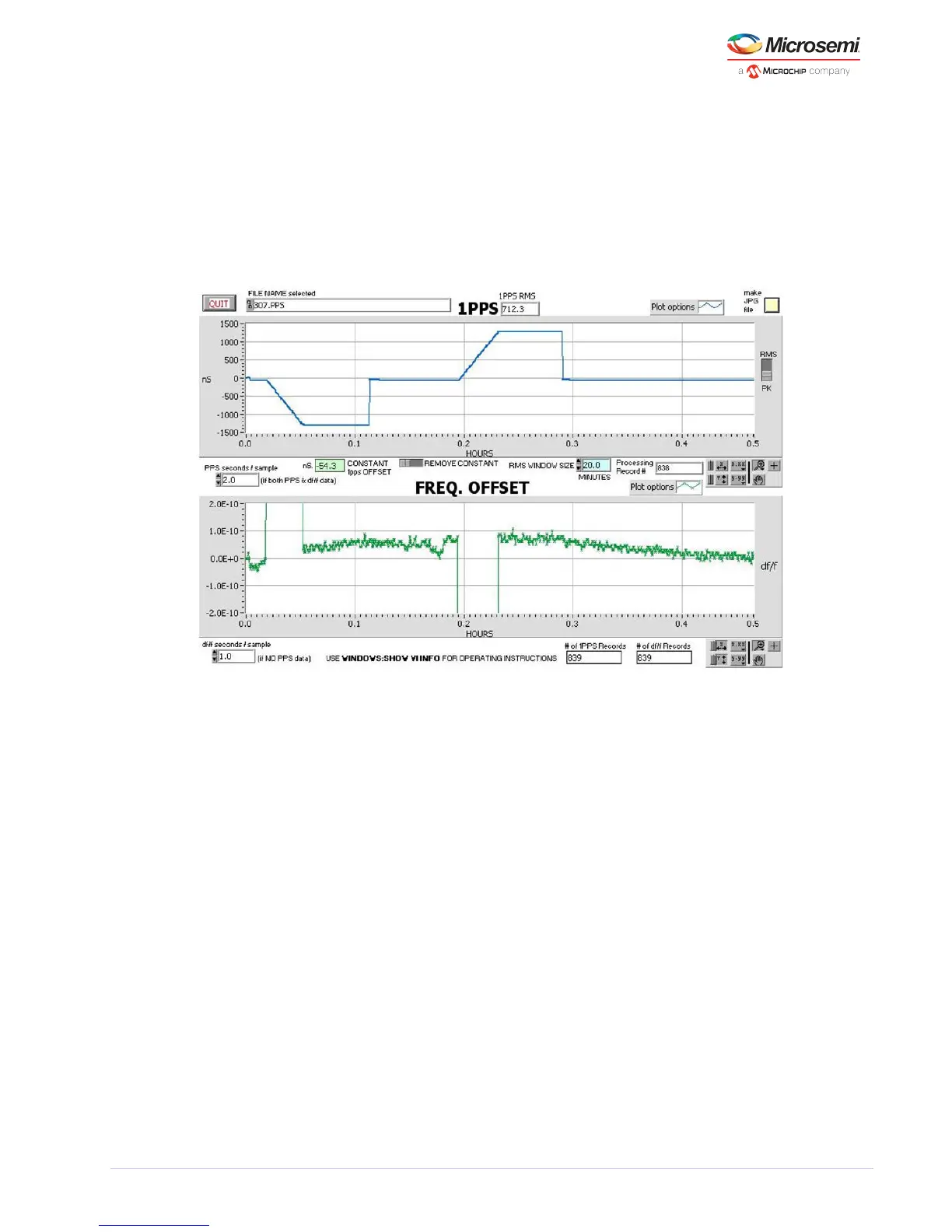
In this test, the antenna to the GPS receiver is removed. The SA.22c is set to an off frequency long
enough to induce a 1PPS error over 1 μsec. When the antenna is reapplied, the SA.22c 1PPS recovers by
resetting to 1PPS 0 ns (JamSynch). This procedure is repeated to cause both a leading and lagging 1PPS.
Note: This test is performed on a unit started cold that causes the general curve in the frequency data
(excluding the intentional offsets).
Figure 20 • Flywheeling Recover with 1PPS offset >1 μsec
7.9 1PPS Algorithm Theory of Operation
SA.22c qualifies 1PPS inputs by analyzing the time difference between the SA.22c’s 1PPS output and the
external 1PPS input. This is referred to as the holdover state. The SA.22c determines whether the 1PPS
input is usable by calculating the rate of change in timing measurements that are taken once per
second.
After a 1PPS input is qualified, the SA.22c 1PPS algorithm determines if it is necessary to adjust the
counter that produces the 1PPS output (JamSynch state). The algorithm then begins to adjust the output
frequency of the SA.22c to keep the 1PPS output aligned with the 1PPS input. This is the disciplining
state, and the control method is a proportional integral derivatives (PID) scheme.
The amount of frequency change and the length of time required to reach 1PPS accuracy is adjusted by
setting y1 (damping factor) and y2 (time constant) parameters. During this disciplining state, the timing
of each 1PPS input is compared to the expected value. If the offset exceeds 333 ns, the algorithm
changes to the holdover state and the process begins again. The following figures provide a detailed
explanation.