1. GENERAL DESCRIPTION
1 − 10
Servo motor
Servo
amplifier
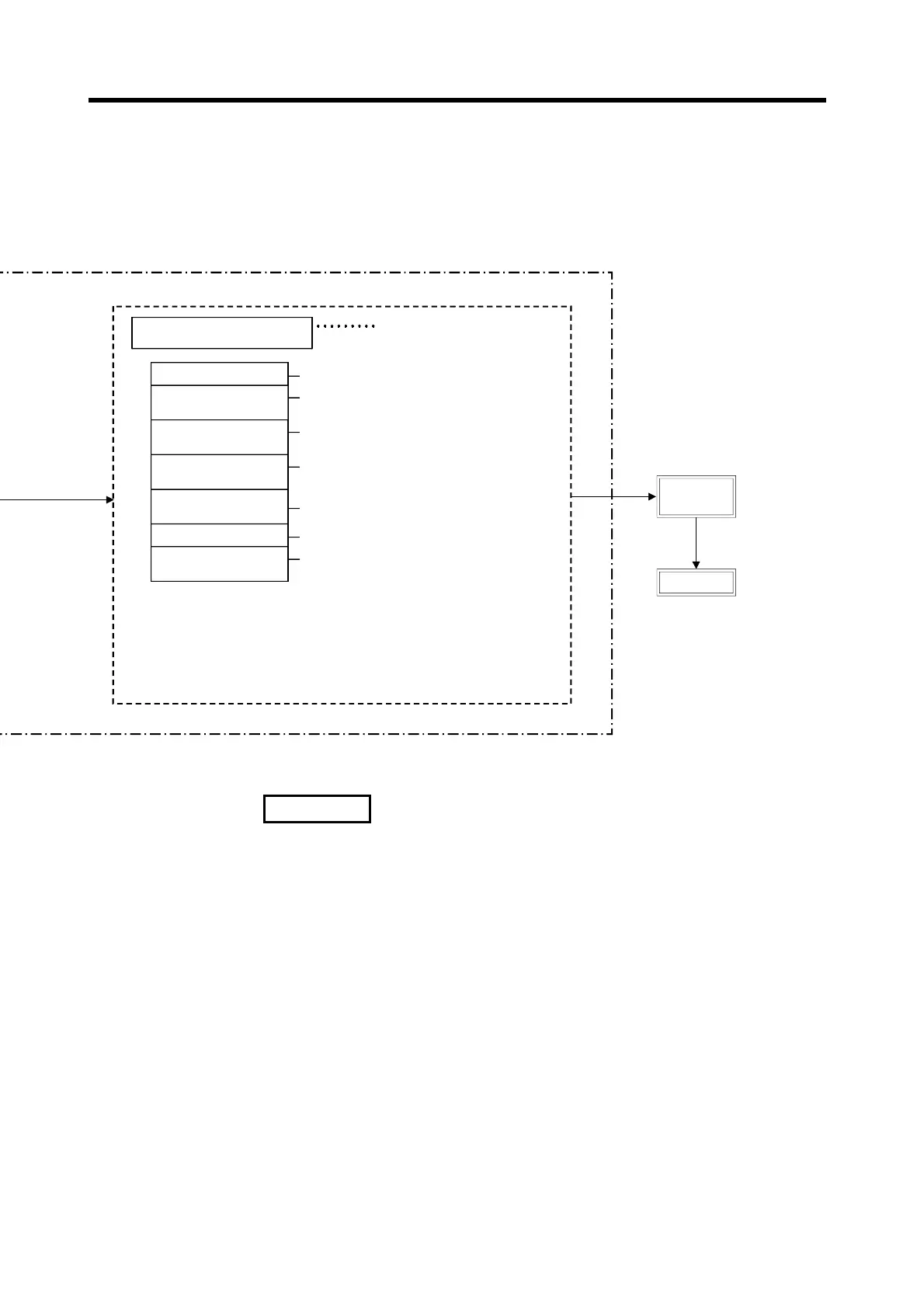
Positioning control
parameters
Set and changed using a
peripheral device
(Note-1)
System settings
System data such as axis allocations
Fixed parameters
Fixed data decided, for example, by
the mechanical system
Servo parameters
Data decided by the specifications of the
connected servo equipment
Parameter block
Data required to execute acceleration,
deceleration, etc. in positioning control
Zeroing data
D
ata required to execute zeroing
JOG operation data
Data required to execute JOG operation
Limit switch output
data
ON/OFF pattern data required to execute the limit
switch output function
PCPU Control
REMARK
(Note-1): Any of the following peripheral devices, running the SW2SRX-
GSV13PE/SW2SRX-GSV22PE software, can be used.
• IBM PC

 Loading...
Loading...





