4. PARAMETERS FOR POSITIONING CONTROL
4 − 6
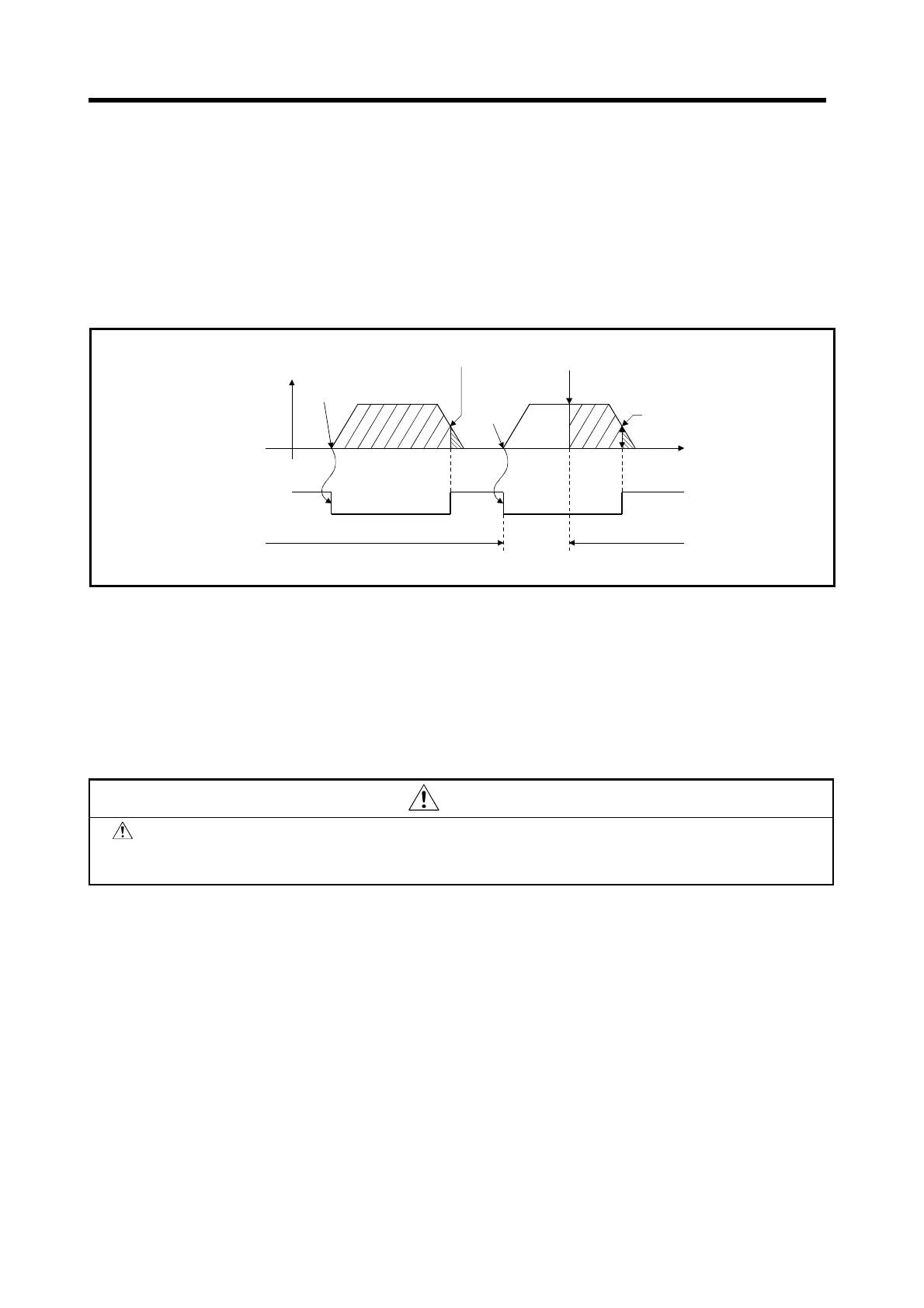
4.2.3 Command in-position range
The command in-position is the difference between the positioning address
(command position) and feed current value.
Once the value for the command in-position has been set, the command in-
position signal (M2403 + 20n) will come ON when the difference between the
command position and the feed current value enters the set range [(command
position − feed current value) ≤ (command in-position range)].
The command in-position range check is executed continuously during positioning
control.
Command in-position
(M2403+20n)
ON
OFF
Executioon of command
in-
osition check
Command in-position
set value
Positioning
control start
V
t
Command
in-position set valu
Switch from
speed to
position
Execution of command
in-
osition check
Speed/position
switching controlstart
4.3 Servo Parameters
(1) The servo parameters are parameters set for each axis : their settings are data
fixed by the specifications of the controlled motors and data required to execute
servo control.
(2) The servo parameters are set with a peripheral device.
CAUTION
After setting the servo parameters at a peripheral device, execute a "RELATIVE CHECK" and
execute positioning control in the "NO ERROR" status. If there is an error, check the relevant
points indicated in this manual and reset it.

 Loading...
Loading...





