7. POSITIONING CONTROL
7 − 36
7.6 Circular Interpolation Using Auxiliary Point Designation
Circular interpolation control by designating the end point address and auxiliary
point address (a point on the arc).
Circular interpolation control using auxiliary point designation uses ABS
(absolute data method) and INC (incremental method) servo instructions.
Items Set by Peripherals
Common Arc Parameter Block Others
Servo
Instruction
Positioning
Method
Number of
Controllable
Axes
Parameter Block No.
Axis
Address/Travel Value
Commanded Speed
Dwell Time
M-Code
Torque Limit Value
Auxiliary Point
Radius
Center Point
Control Unit
Speed Limit Value
Acceleration Time
Deceleration Time
Rapid Stop Deceleration Time
Torque Limit Value
Deceleration Processing on Stop Input
Allowable Error Range for Circular Interpolation
S-Curve Ratio
Cancel
Start
Speed Change
ABS
Absolute data
INC
Incremental
2 ∆ !!! ∆∆ ! ∆∆∆∆∆∆∆∆∆∆∆OK
! : Must be set
∆ : Set if required
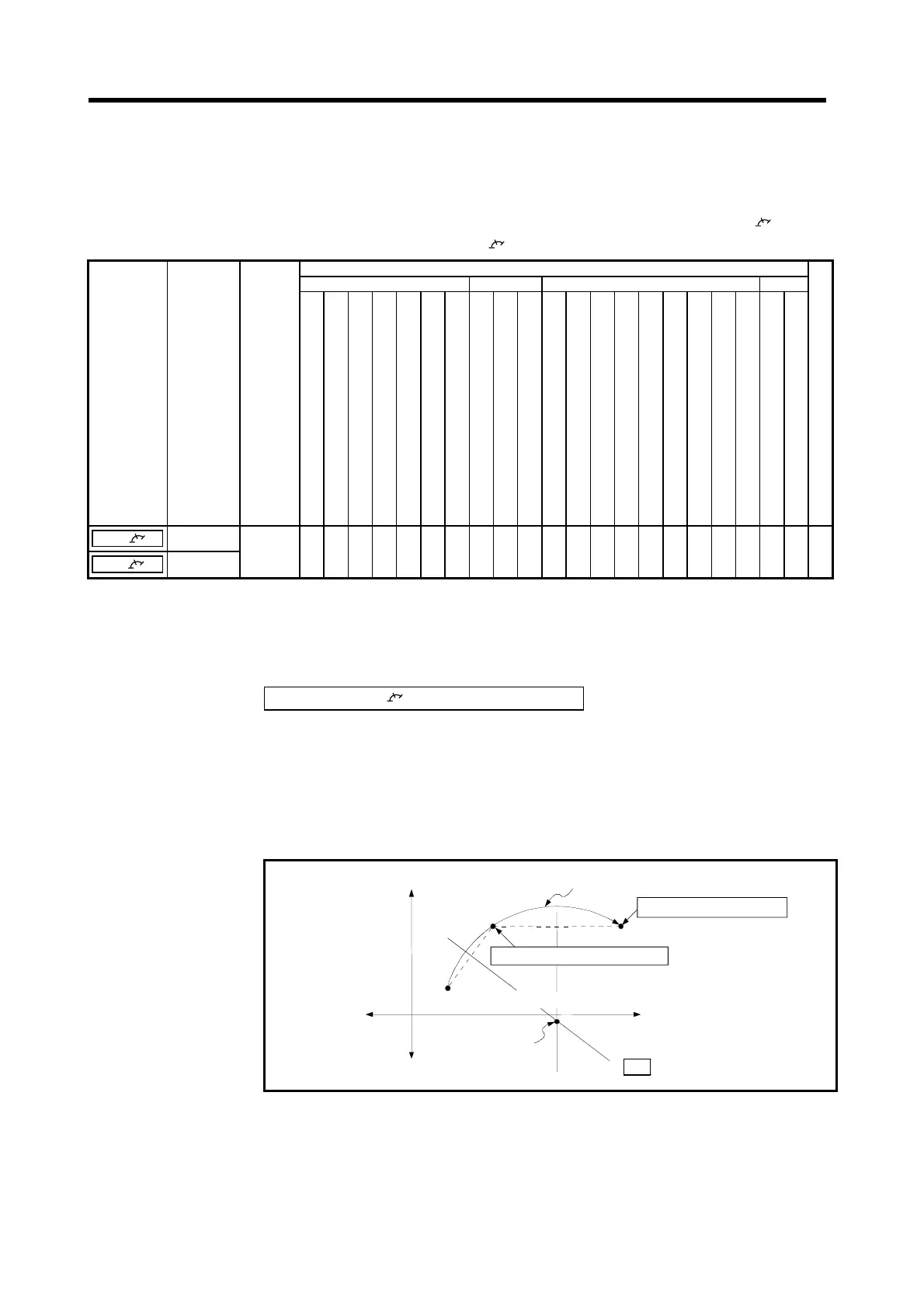
[Control Details]
Control with ABS
(absolute data method).
(1) Circular interpolation from the current stop address (pre-positioning address)
through the designated auxiliary point address to the end point address, using
the home position as the reference.
(2) The center of the arc is the point of intersection of the perpendicular
bisectors of the start point address (current stop address) to the auxiliary point
address, and the auxiliary point address to the end point address.
: indicates set data
Forward direction
0
Reverse
direction
Reverse direction
Movement due to circular interpolation
Forward direction
Start point address (X
0
, Y
0
)
Auxiliary point address (X
2
, Y
2
)
End point address (X
1
, Y
1
)
Center of arc
Fig.7.9 Circular Interpolation Control by Absolute Data Method

 Loading...
Loading...





