APPENDICES
APP − 23
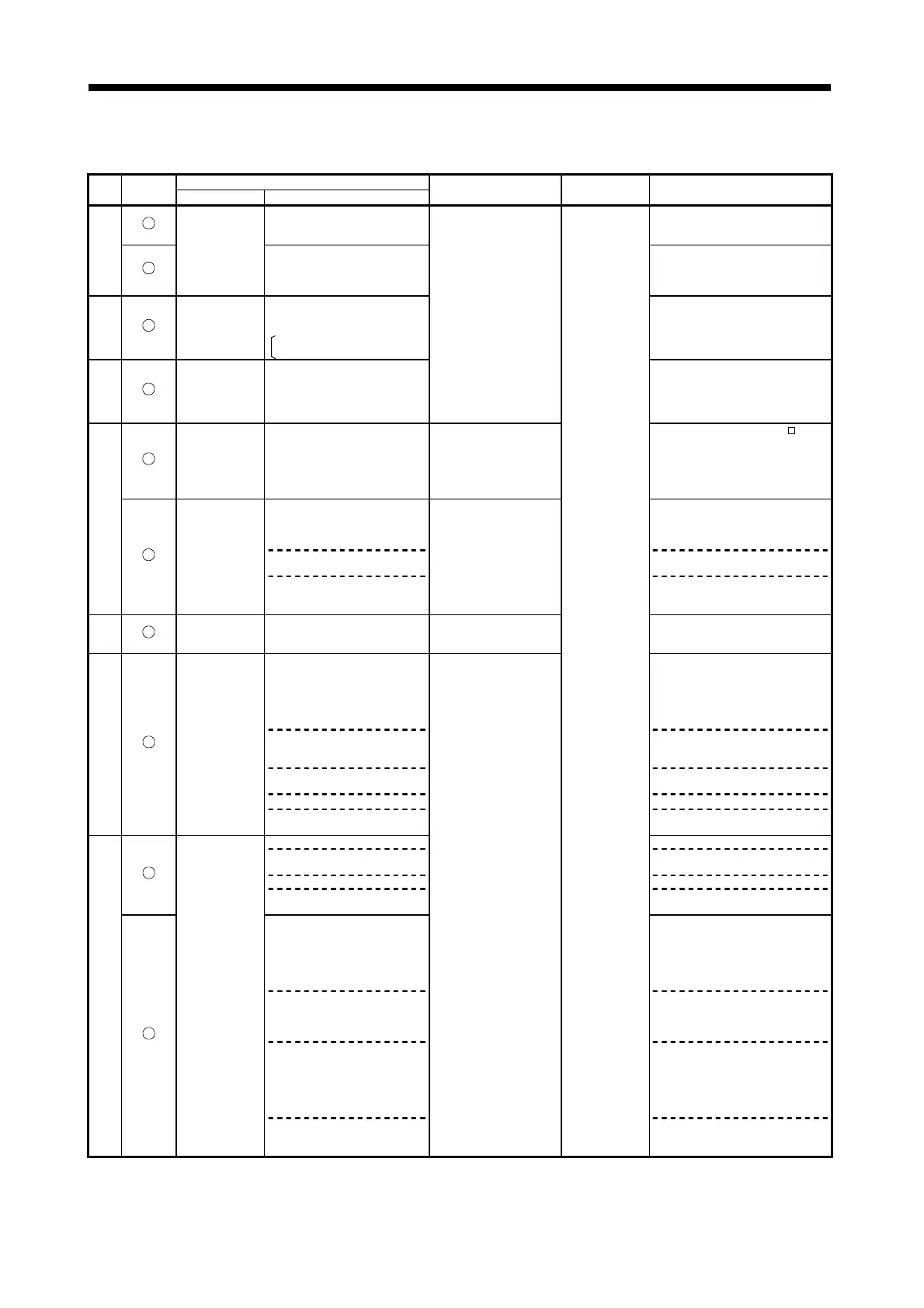
Table 2.12 Servo Amplifier Error List (2000 to 2799) (Continued)
Error Cause
Error
Code
Amplifier
Type
Name Description
When Error Checked Error Processing Corrective Action
A
• During operation, communication
with the encoder is not normal.
• Check wiring between the encoder and
ADU.
• Change the servo motor (encoder).
2020
M
Position sensor
error 2
• Fault in communication with the
encoder
• Check the encoder cable connector for
disconnection.
• Change the servo motor.
• Change the encoder cable.
2021
M
Converter RD off
(400VAC series
servo only)
• The servo-on (SON) signal turned
ON when the ready signal (RD) of
the converter is OFF.
1. Bus voltage is low.
2. Alarm occurring in converter.
• Remove the cause of the converter
alarm. Deactivate the alarm.
2024
M
Output ground
fault
• U, V, or W of the servo amplifier
output grounded
At any time during operation
• Use a multimeter to check between the
U, V, and W terminals and the case.
• Use a multimeter and megger to check
between the U, V, and W terminals of
the motor and the core.
A
Absolute position
erase
• In the absolute value encoder, the
voltage of the super capacitor in
the encoder is less than 2.5±0.2V.
• In the absolute value encoder,
speed was 500rpm or higher during
a power failure.
• At power-on of servo
amplifier
• At servo error reset
• Change the battery (MR-JBAT ).
• Check the wiring between encoder and
ADU.
• The voltage of the supercapacitor
inside the absolute position sensor
has dropped.
• Turn the power ON for 2 to 3 minutes to
charge the supercapacitor, switch the
power OFF then ON again, and
execute a zeroing.
• The battery voltage is low. • Turn the servo amplifier power OFF,
then measure the battery voltage.
2025
M
Battery alarm
• Failure of battery cable or battery.
(Zeroing must be re-executed after
clearing the error.)
• When the servo amplifier
power is turned ON
• At the leading edge of the
PLC READY flag (M2000)
• When a servo error is reset
• When the power to the
servo system CPU is
turned ON
• Replace the servo amplifier battery.
2026
A
Module mismatch
• The servo parameter (system
settings) does not match the real
servo amplifier.
• At power-on of servo
amplifier
• At servo error reset
• Reconsider the system settings.
• The frequency of ON/OFF
switching of the power transistor for
regeneration is too high. (Caution
is required since the regenerative
resistor could overheat.)
• Reduce the frequency of acceleration
and deceleration or feed speed while
checking the servo monitor
regeneration level (%).
• Reduce the load.
• Increase the servomotor capacity.
• Servo parameter (system settings)
setting error
• Check the servo parameters
(regenerative resistor and motor type
settings in the system settings).
• Incorrect wiring of regenerative
resistor
• Connect the regenerative resistor
correctly.
• Failure of regenerative resistor • Replace the regenerative resistor.
2030
M
Excessive
regeneration
• Power transistor for regeneration
damaged by short circuit
• Replace the servo amplifier.
• The command speed is too high. • Reconsider the command speed.
• Overshoot occurred during
acceleration.
• Reconsider the servo parameter.
• Encoder fault. • Change the encoder.
A
• Encoder cable fault or wiring
mistake.
• Check the wiring between encoder and
ADU.
• The motor rpm has exceeded
115% of the rated rpm.
• Check the motor rpm in the servo
parameters.
• Check if the number of pulses per
revolution and travel value per
revolution in the fixed parameters
match the machine specifications.
• An overshoot has occurred
because the acceleration time
constant is too small.
• If an overshoot occurs during
acceleration, check the acceleration
time and deceleration time in the fixed
parameters.
• An overshoot has occurred
because the servo system is
unstable.
• If overshoot occurs, increase the speed
integral compensation by adjusting the
position loop gain / position control
gain 1, 2, speed loop gain / speed
control gain 1, 2 in the servo
parameters.
2031
M
Overspeed
• Encoder fault.
At any time during operation
Immediate stop
• Check the encoder cable for wire
breakage.
• Change the servo motor.

 Loading...
Loading...





