February 2007 /// Created by: FA-EBG Marketing Communications Dept
Servo /// Motion /// Servo /// Motion /// Servo /// Motion /// Servo /// Motion /// Servo
20SSC-H System Communication
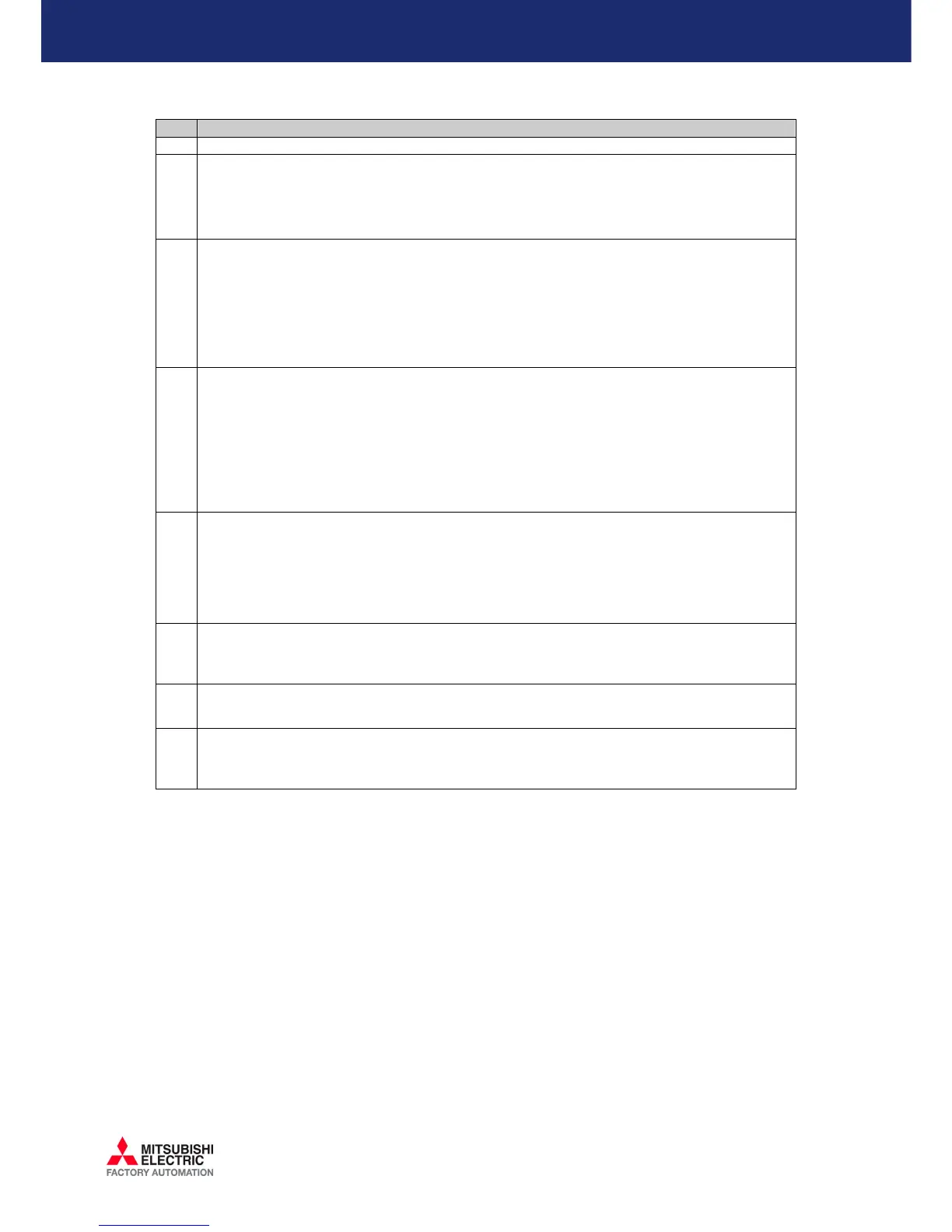
No. Description
(1) Read/Write/Monitor/Test the sequence programs with GX (IEC) Developer.
(2) Read out the following data from the FX3U-20SSC-H BFM to FX Configurator-FP.
· Positioning parameters
· Servo parameters
· Table information
· Monitor data (Operation status, motion status, input signal status, etc.)
(3) Write the following data from FX Configurator-FP to the FX3U-20SSC-H BFM.
· Positioning parameters
· Servo parameters
· Table information
· Control data (The present value change, speed change and operation test command,
etc.)
(4) Read/Write the following data in BFM with sequence program.
· Positioning parameters
· Servo parameters
· Table information
· Monitor data (Operation status, motion status, input signal status, etc.)
· Control data (The present value change, speed change and operation test command,
etc.)
(5) Store the following BFM data to the Flash ROM by the store command from a sequence
program, FX Configurator-FP.
· Positioning parameters
· Servo parameters
· Table information
(6) Positioning/servo parameters and table information transfer from the Flash ROM to the
BFM at power ON. Simultaneously, servo parameters transfer to the servo amplifiers.
(7) Servo parameters in the BFM transfer to the servo amplifiers at power ON.
(8) FX3U-20SSC-H retrieves the servo parameters changed by the servo amplifiers and
updates the servo parameters in its BFM.
In this document, sections of the FX3U-20SSC-H BFM are referred to as:
Positioning parameters
Servo parameters
Table information
Monitor data
Control data
The positioning parameters, servo parameters and table information can be read and
written with several devices including FX Configurator-FP, GX (IEC) Developer and
human machine interfaces. The monitor data can only be read from the BFM (except for
the current address, which has write access), while the control data can be read and
written to the BFM. Control data is written to the BFM very frequently, while positioning
parameters, table information and servo parameters are usually set up less frequently.
For a list of how the areas of the buffer memory can be accessed in terms of read/write,
please refer to the following table.

 Loading...
Loading...







