Mitsubishi Electric Europe B.V. /// FA-European Business Group /// Gothaer Strasse 8 /// D-40880 Ratingen /// Germany
Tel: (02102) 4860 /// Fax: (02102) 486112 /// Email:info@mitsubishi-automation.com /// Web: www.mitsubishi-automation.com
February 2007 /// Created by: FA-EBG Marketing Communications Dept
Servo /// Motion /// Servo /// Motion /// Servo /// Motion /// Servo /// Motion /// Servo
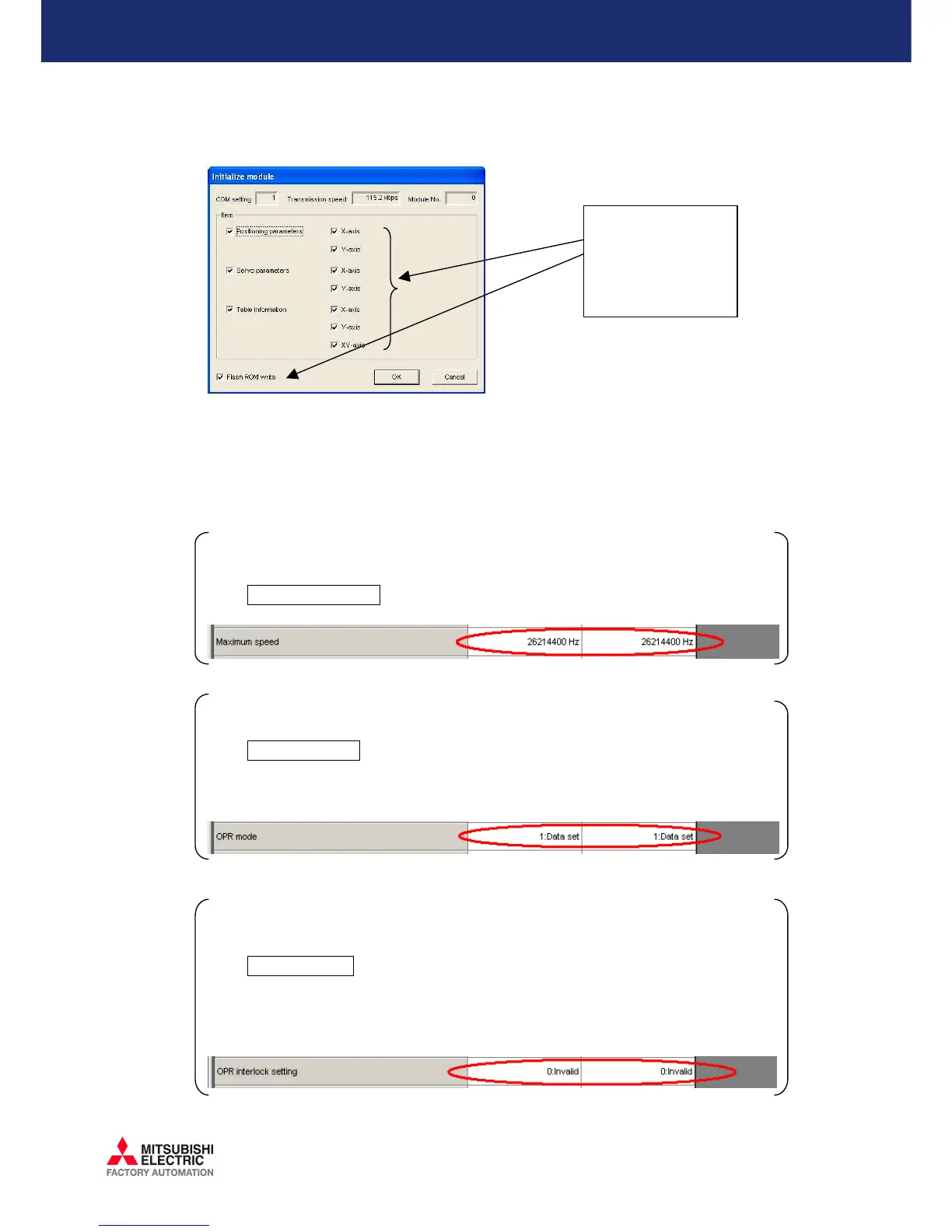
Select all servo parameters, positioning parameters and table information and
place a check mark in ‘Flash ROM write.’ Click the OK button and proceed with
selecting ‘Yes’ and then ‘OK.’
6) Set the positioning parameters
Double click on ‘Positioning parameters’ in the ‘File data list’ panel on the left-
hand side to modify the positioning parameters.
Change the following items from the ‘Item’ column:
Positioning parameters
· Maximum speed →
for X- and Y-axes.
Positioning parameters
· OPR mode →
for X- and Y-axes.
(This setting is used specifically for a system
without a DOG or mechanical zero-point.)
Positioning parameters
· OPR interlock setting →
for X- and Y-axes.
(This is used to ensure that the START command
functions regardless of the zero return complete
flag’s Status (BFM#28/128, b3).)
“26214400 Hz”
“1: Data set”
“0: Invalid”
Select all
information to
initialize the
20SSC-

 Loading...
Loading...







