2-29 Options
2 Robot arm
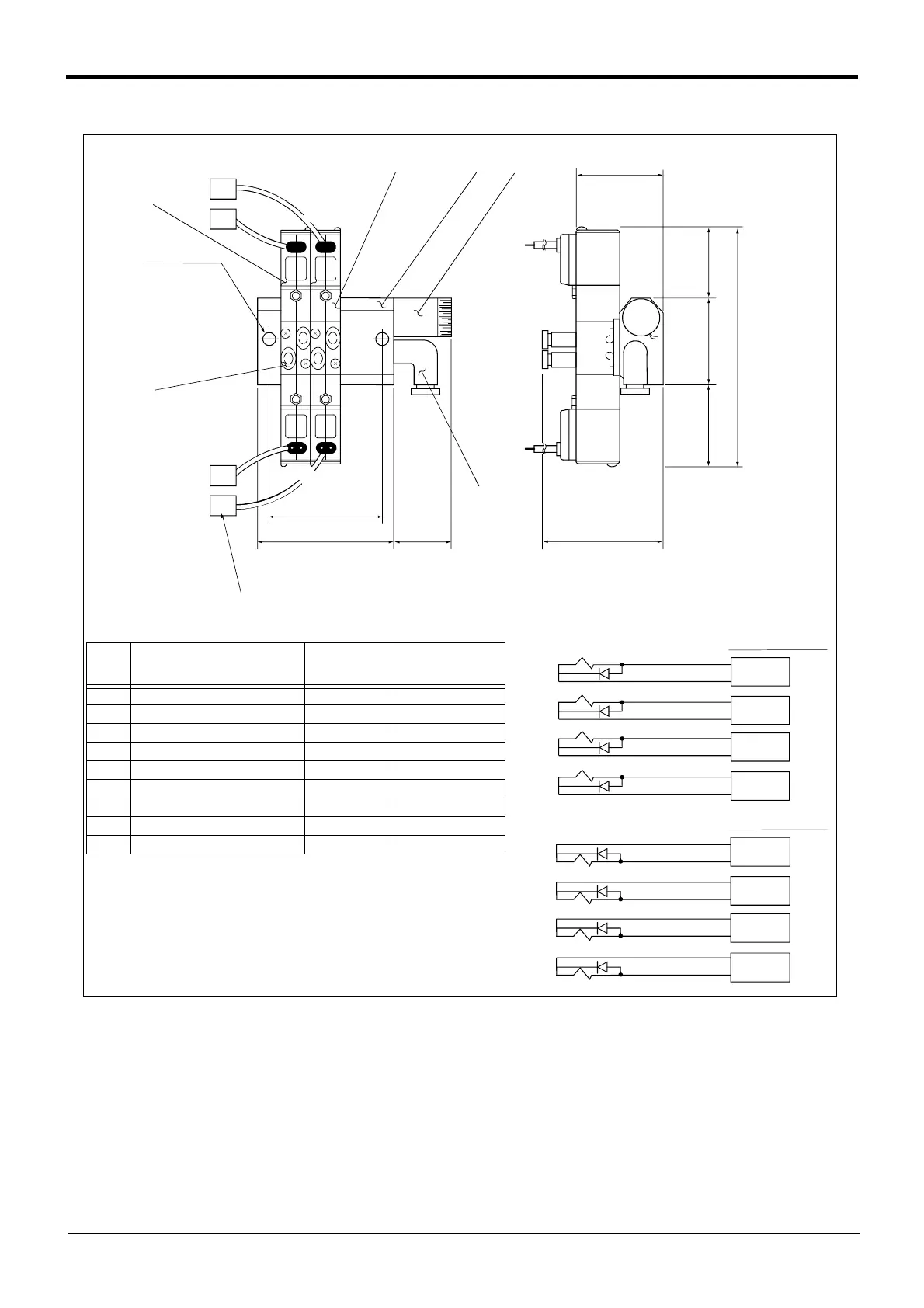
Fig.2-13 : Outline dimensional drawing
1
Hand1ON
2
24G
1
Hand1OFF
2
1
Hand2ON
2
1
Hand2OFF
2
GR1
GR2
GR3
GR4
Connector name
SOL1A
SOL1B
SOL2A
SOL2B
Black
Red
Black
Red
Black
Red
Black
Red
<Source type>
24G
24G
24G
General purposes
output 900
General purposes
output 901
General purposes
output 902
General purposes
output 903
1
Hand1ON
2
+24V
1
Hand1OFF
2
1
Hand2ON
2
1
Hand2OFF
2
GR1
GR2
GR3
GR4
Connector name
SOL1A
SOL1B
SOL2A
SOL2B
+24V
+24V
+24V
Black
Red
Black
Red
Black
Red
Black
Red
<Sink type>
General purposes
output 900
General purposes
output 901
General purposes
output 902
General purposes
output 903
28.4
35.6
36.4
以下
(20)
以下
(45)
(1)(4) (2)
(6)
(5)
(3)
(10)(11)
(1)
(12) 2-φ 3.3
(28) (24)(30)
(82)
GR1
GR3
GR2
GR4
SOL1A
SOL2A
SOL2B
SOL1B
Part
no.
Part name 1 sets 2 sets Specifications
(1) Solenoid valve 1 2
(2) Manifold block 1 1
(3) Quick coupling 2 4 φ4
(4) Block plate 1 0
(5) Quick coupling 1 1 φ6
(6) Silencer 1 1
(10) Connector 2 4 SMR-02V-B
(11) Contact 4 8 SYM-001T-0.6
(12) Installation screw 2 2 M3×25
(20) or less
(45) or less
 Loading...
Loading...




