8
NOTE: CITRSLDMSNESGD%+@MC%1SQHLLDQR@KSDQRSGDRODDCNESGDA@QQHDQ@RSGHRHRBNMMDBSDCVHSG%.1"$
CDBQD@RDHM%.1"$B@TRDR@CDBQD@RDHMRODDC
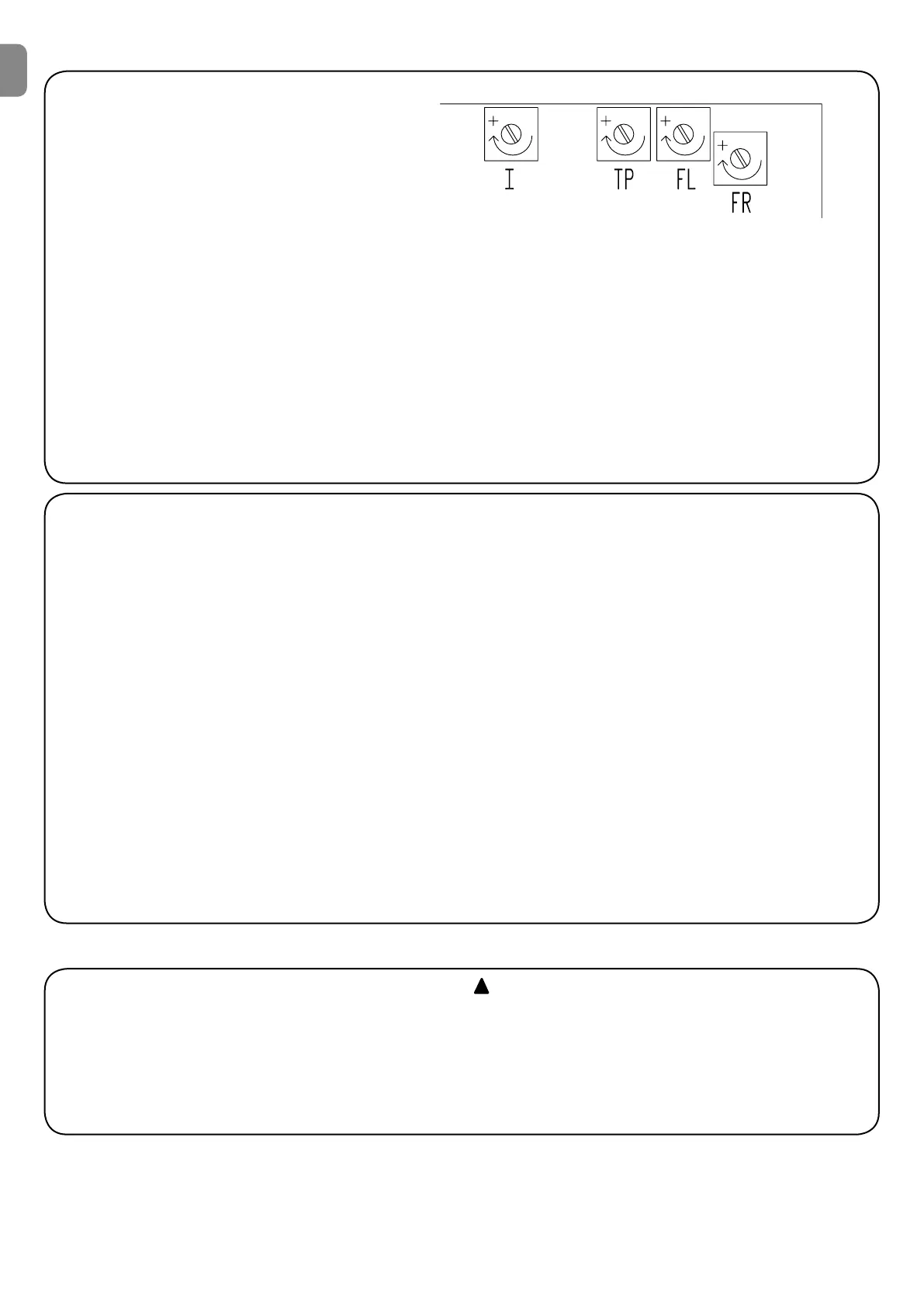
I +@RSKX@CITRSSGDSQHLLDQ23./> ,/$1$RNSGDNARS@BKDCDSDBSHMFRXRSDLA@RDCNM@M@LLDSQHBEQHBSHNMRXRSDLHR@BSHU@SDC@RRNNM
as an appropriate opposite action is applied to the bar. The ammetric friction system comes into play in both directions.
TP(EXNTG@UDBGNRDMSGD@TSNL@SHBETMBSHNMHMFLNCDCHORVHSBG-N.-SGDDMCNESGDNODMHMFL@MNDTUQDHRENKKNVDCAX@fO@TRDt
SHLD@SSGDDMCNEVGHBG@BKNRHMFL@MNDTUQDENKKNVR@TSNL@SHB@KKX3GDSHLDRS@XRNODMB@MAD@CITRSDCVHSGSGD/ 42$3(,$SQHLLDQ
for the length of time you want, without any limits. An automatic closing manoeuvre and the relative pause time are activated also in the
semiautomatic functioning mode when, in closing, the triggering of a safety device will cause the gate to reverse direction
4) Adjustments
FL CITRSLDMS NE SGD 6.1* %.1"$ SQHLLDQ DM@AKDR
control of the barrier speed
FR CITRSLDMS NE SGD #$"$+$1 3(.- %.1"$ SQHLLDQ
enables setting of the required thrust to ensure cor-
rect operation in the deceleration phase so that the
QNCQD@BGDRSGDRSNOONHMSR@RfRLNNSGKXt@RONRRHAKD
VHSGNTS INKSHMF SGD ODQEDBS RDSSHMF NE SGD A@K@MBHMF
spring is fundamental of course.
4.1) Functioning modes
(MSGDL@MT@KETMBSHNMHMFLNCDSGD./$-HMOTS@KKNVRLNUDLDMS
TOSNSGDNODMHMFONHMSSGD"+.2$HMOTS@KKNVRLNUDLDMSTOSN
SGD BKNRHMF ONHMS 23$/!823$/ @KKNVR @KSDQM@SHUD NODMHMF @MC
BKNRHMF L@MNDTUQDR @R RNNM @R SGD BNLL@MC HM HMOTS RSNOR
movement stops. In the opening phase movement stops when the
maximum opening point is reached or if there is no consent from
/'.3."$++SNSGDBNMSQ@QXHMSGDBKNRHMFOG@RDLNUDLDMSVHKK
stop at the maximum closed point or if there is no consent from the
/'.3."$++(E 23./HRSQHFFDQDCHSVHKKB@TRDLNUDLDMSSNRSNO
immediately both in the opening and closing manoeuvres. Once
movement has stopped the command in input has to be stopped
ADENQD@MXMDVLNUDLDMSRB@MADQDBSHUD
(MDHSGDQ NESGD@TSNL@SHBETMBSHNMHMF LNCDRRDLH@TSNL@SHB@TSN-
L@SHB@MCBKNRDR@KV@XR@BNLL@MCNMSGD./$-HMOTSVHKKB@TRD
@MNODMHMFL@MNDTUQDHESGDBNLL@MCQDL@HMR3(,$1NMBDSGD
A@QHRNODMSGDA@QQDL@HMRfEQNYDMtHM@MHMjMHSDO@TRDNMKXVGDM
the command stops will the bar be able to close. Command pulses
NMSGD"+.2$HMOTSVHKKB@TRD@BKNRHMFL@MNDTUQDHESGDBNLL@MC
remains the bar will stay locked in the closed position until the com-
L@MCBD@RDR@MCNMKXSGDMB@MHSADQDNODMDC OTKRDNM23$/
!823$/B@TRDR@KSDQM@SHUDNODMHMF@MCBKNRHMF
RDBNMCOTKRDNMSGD 23$/!823$/ NQ NMSGDR@LDHMOTSSG@S
started the movement, will cause a Stop.
Whether in the opening or closing phase, if STOP triggers it will
cause movement to stop immediately.
(M @M NODMHMF L@MNDTUQD SQHFFDQHMF NE SGD /'.3."$++ G@R MN
DEEDBSVGHKD/'.3."$++VHKKB@TRDQDUDQR@KNELNUDLDMSHM@BKN-
RHMFL@MNDTUQDSQHFFDQHMFNESGD/'.3."$++B@TRDRLNUDLDMSSN
reverse followed by a new pause and lastly reclosing.
(E@SSGDADFHMMHMFNE@MNODMHMFLNUDLDMSSGD/'.3."$++HMOTS
does not give consent, the request to open is cancelled.
If the automatic functioning mode is being used, there will be a
pause time subsequent to an opening manoeuvre and followed by
@BKNRHMFL@MNDTUQD(ECTQHMFSGDO@TRDSGD/'.3."$++SQHFFDQR
SGDSHLDQVHKKADQDRDSVHSG@MDVSHLDHENMSGDNSGDQG@MC@23./
comes into play during the pause, the reclosing function will be can-
celled and there will be a STOP condition.
The unit comprises a set of microswitches used to operate various
functions so as to render the system more suitable to user needs
and safer in the different ways of usage. All functions are activated
AX OK@BHMF SGD CHORVHSBG HM SGD f.-t ONRHSHNM VGHKD SGDX VHKK MNS
AD @BSHU@SDC HE SGD BNQQDRONMCHMF CHORVHSBGDR @QD f.%%t RNLD
functions do not have an immediate effect and only have sense in
certain conditions like.