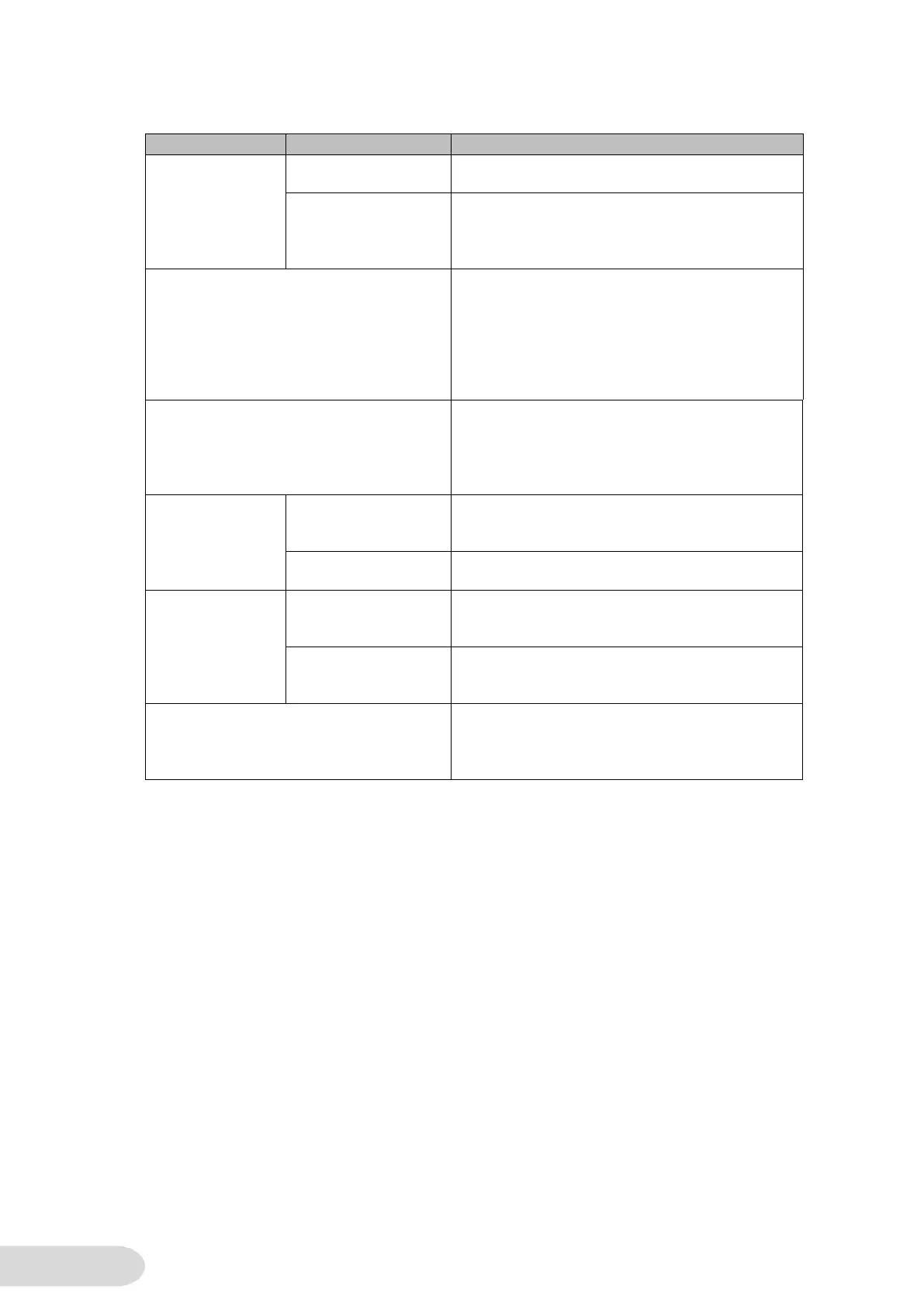
Completion of the tuning is determined based on the selection for the following items.
Set the stabilization time that is applied as the
tuning completion condition.
The function block automatically sets the
stabilization time as short as possible within
the range that does not cause micro vibration
in the drive.
Vibration detection level
Adjust the gain so that the torque vibration
does not exceed this setting value. Set the
percentage to the rated torque of the motor.
Servo Drive Unit Version 1.0 and 1.1 do not
use decimal digit resolution, whereas Servo
Drive Unit Version 1.2 or later uses 1 decimal
digit resolution.
Positioning completion width
Set the in-position width used for measuring
the stabilization time. This setting value is
applied to the Positioning Completion
Notification - Positioning Window (3B51 hex -
01 hex).
Focused on
following
performance
Priority is given to reducing the stabilization
time. Depending on the machine and tuning
conditions, overshoot may occur.
Priority is given to suppression of overshoot in
the tuning.
Motion
interpolation
method
*2
Set the interpolation method for the command
in the cyclic synchronous position mode (csp)
to 2nd order interpolation.
Set the interpolation method for the command
in the cyclic synchronous position mode (csp)
to 1st order interpolation.
Save tuning results to EEPROM
Select whether to save tuning results to
EEPROM. If you select “Not perform”, the
tuning results will be lost when the power
supply to the drive is turned OFF.
*1. This item can be set when two-degree-of-freedom is set.
*2. Revised in Servo Drive Unit Version 1.2 or later.
 Loading...
Loading...





