49
7.3.6. fhsample_trig
Function
Sends measurement commands to the Vision Sensor and receives the measurement
results from the Vision Sensor
Syntax
fhsample_trig(fh_socket, retries_rev, timeout_recv, param(), err_no)
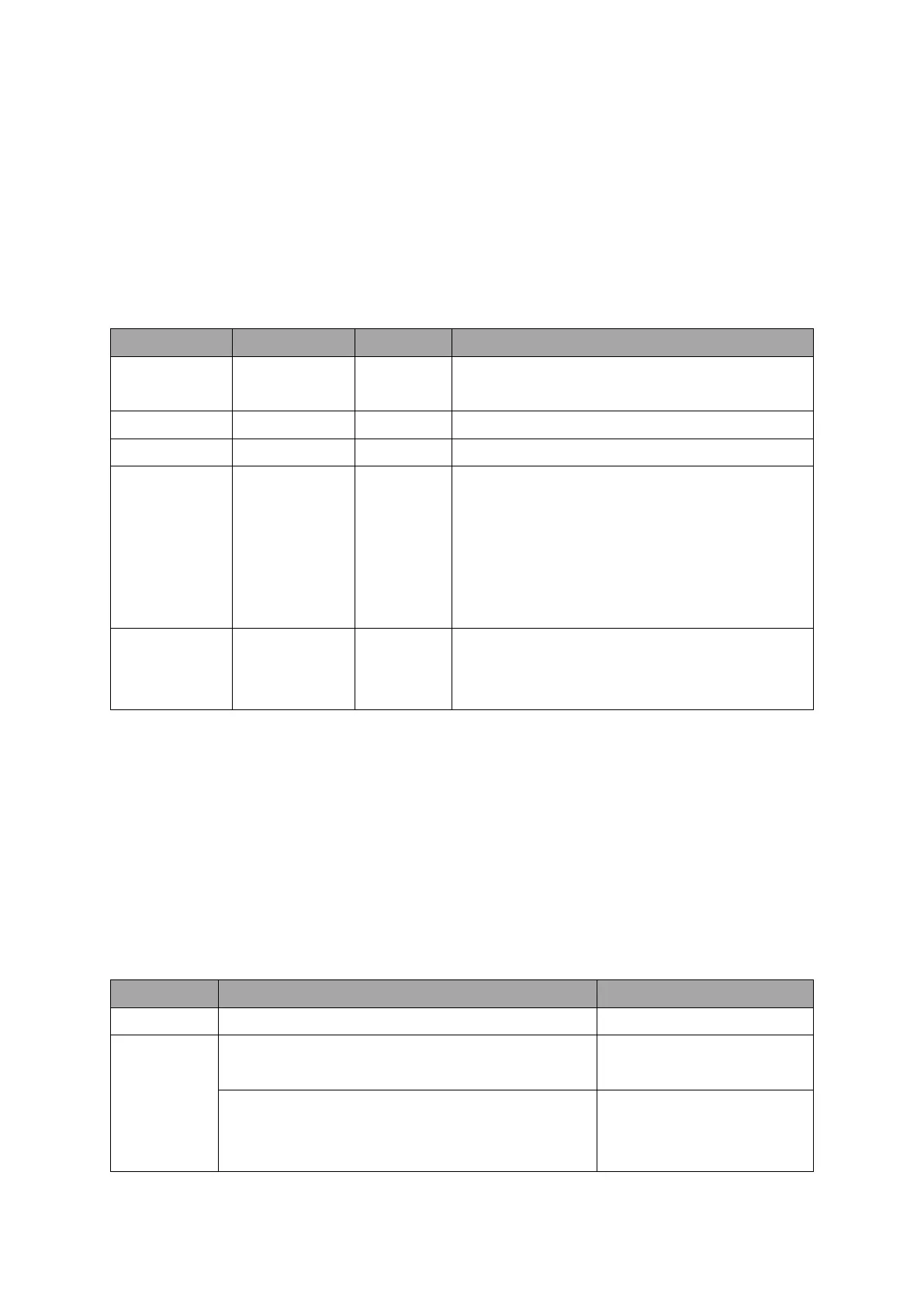
Parameter
fh_socket Input Integer Number of sockets already connected to the
Number of receive retries (0 to 99)
Receive timeout time (0 to 99sec)
param() Output Double param(0):Target X coordinate
param(1):Target Y coordinate
param(2):Target Z coordinate
param(3):Target W(yaw) coordinate
param(4):Target P(pitch) coordinate
param(5):Target R (roll) coordinates
err_no Output Integer error number
Store the result of the execution of this
function.
Remarks
Sends measurement commands to the Vision Sensor.
Receives the measurement results from the Vision Sensor and get the robot position.
Returns an error if called while not connected to the Vision Sensor.
Returns an error if a measurement command failure response is received from the Vision
Sensor.
Returns an error if the Vision Sensor's overall judgment is NG.
Return Value
-1300 ERROR:fhrecvstring():RETRY:-1300
Out of the range of
receive retry count input
ERROR:fhrecvstring():TIMEOUT:-1300 Out of the input range
for the receive timeout

 Loading...
Loading...














