23180-000 Rev A Mobile Robot LD, LD-CT Assembly Instructions 53
LD: 3.5 hours, approx.
LD-CT: 4 hours, approx..
7 years, approx., 16 hrs/day, 5 days/wk
4 years, approx., 19/7 (full-time)
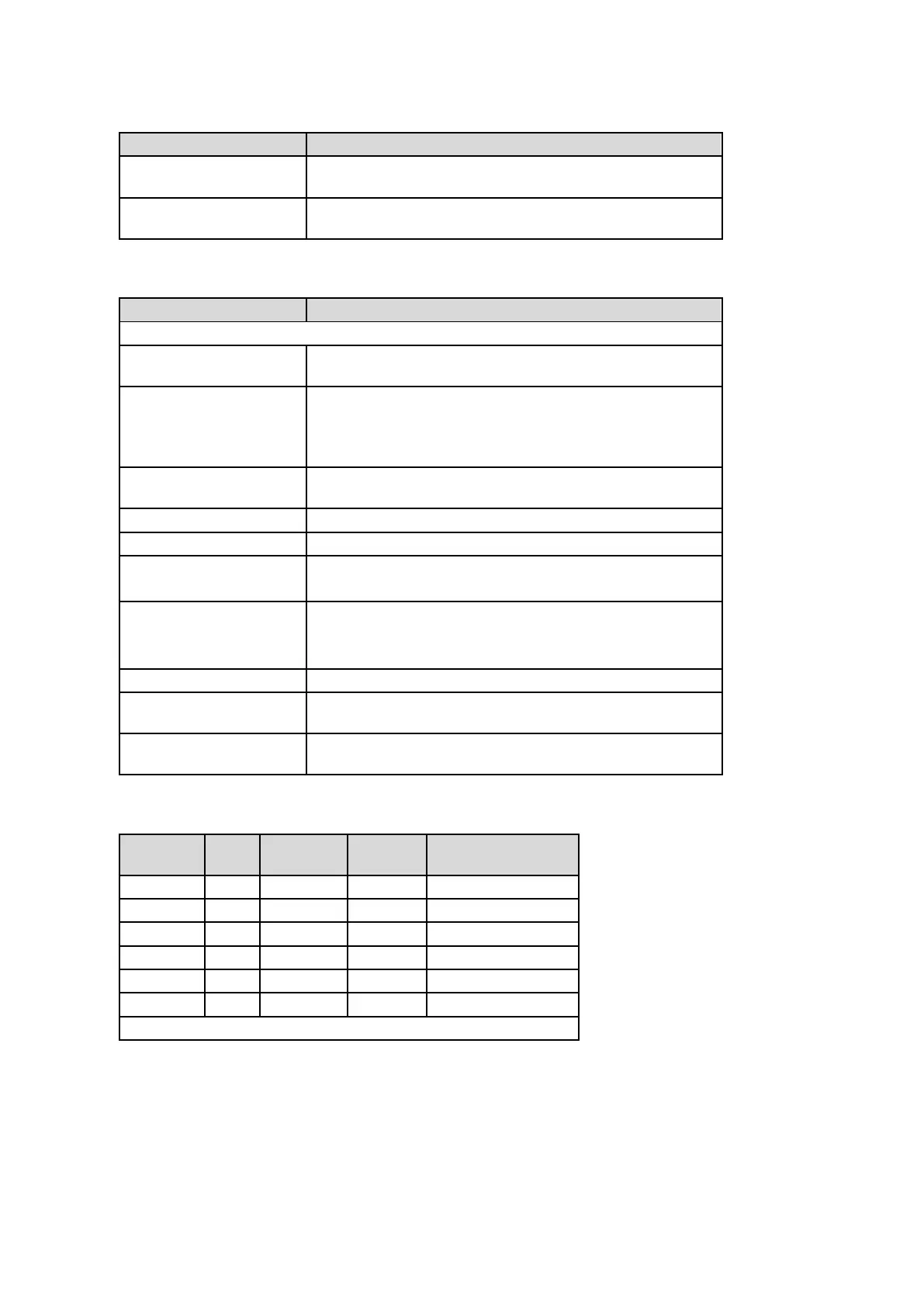
1 at front of platform, 203 mm (8 in.) above floor
250°, 15 m range, Class 1, eye-safe, PLd as per EN ISO 13849-1
Sonar pairs
(Each sonar is one emitter and
one receiver, working
together)
2 at rear of platform, 2 m range
2 at front of platform, in bumper, 2 m range (only in LD)
2 x 512 quadrature (one each wheel)
2 x Hall sensors
Analog gyroscope (LD core)
320 degree/s max rotation
1 at front of platform, 2 pairs of sensors
2 on horizontal tubes of HMI post
270°, 4 m range, Class 1, eye-safe
1 on platform deck, passing through the top plate into the
coupling plate
270°, 4 m range, Class 1, eye-safe
2 on sides of payload structure, user-mounted
Upward-facing camera (Acuity
option)
1 on payload structure, user-mounted
Payload Structure bumpers
(option)
6 inputs, user-designed and mounted sensors (3 front, 3 rear)
* 10 A Switched and 10 A Safe, Switched share the 10 A of current.