MX2 3
Commom specifications
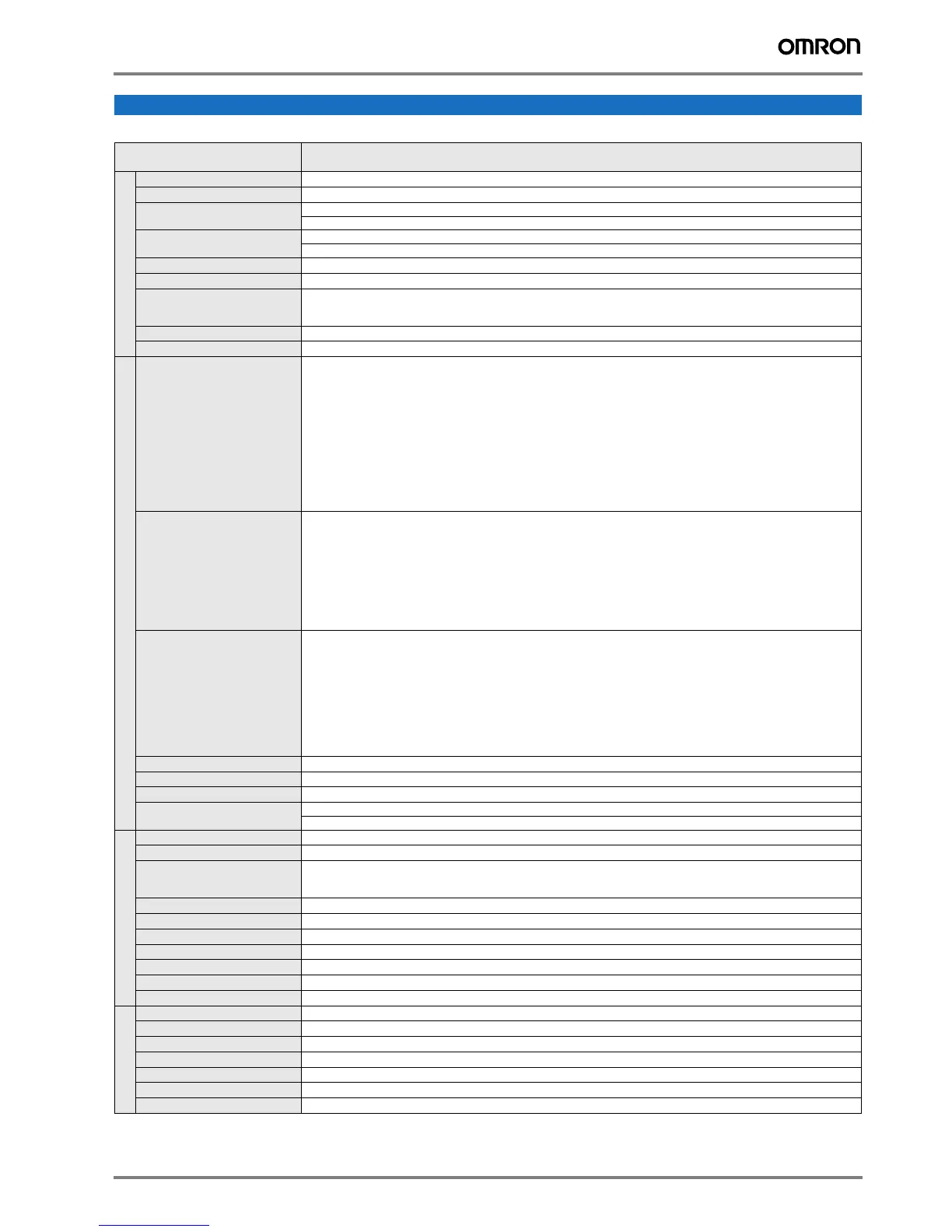
Specifications
Model number
MX2@
Specifications
Control functions
Control methods
Phase-to-phase sinusoidal pulse with modulation PWM (Sensorless vector control, V/F)
Output frequency range
0.10..1000.00 Hz (with restrictions above 400Hz)
Frequency precision
Digital set value: ±0.01% of the max. frequency
Analogue set value: ±0.2% of the max. frequency (25 ±10ºC)
Resolution of frequency set value
Digital set value: 0.01 Hz
Analogue set value: 1/1000 of maximum frequency
Resolution of output frequency
0.01Hz
Starting torque
200% / 0.5 Hz
Overload capability
Dual rating:
Heavy duty (CT): 150% for 1 minute
Normal Duty (VT): 120% for 1 minute
Frequency set value
0 to 10 VDC (10 KΩ), 4 to 20 mA (100 Ω), RS485 Modbus, Network options
V/f Characteristics
Constant/ reduced torque, free V/f
Functionality
Inputs signals
FW (forward run command), RV (reverse run command), CF1~CF4 (multi-stage speed setting), JG (jog command), DB (ex-
ternal braking), SET (set second motor), 2CH (2-stage accel./decel. command), FRS (free run stop command), EXT (external
trip), USP (startup function), CS (commercial power switchover), SFT (soft lock), AT (analog input selection), RS (reset), PTC
(thermistor thermal protection), STA (start), STP (stop), F/R (forward/reverse), PID (PID disable), PIDC (PID reset), UP (re-
mote control up function), DWN (remote control down function), UDC (remote control data clear), OPE (operator control),
SF1~SF7 (multi-stage speed setting; bit operation), OLR (overload restriction), TL (torque limit enable), TRQ1 (torque limit
changeover1), TRQ2 (torque limit changeover2), BOK (Braking confirmation), LAC (LAD cancellation), PCLR (position devi-
ation clear), ADD (add frequency enable), F-TM (force terminal mode), ATR (permission of torque command input), KHC (Cu-
mulative power clear), MI1~MI7 (general purpose inputs for EzSQ), AHD (analog command hold), CP1~CP3 (multistage-
position switches), ORL (limit signal of zero-return), ORC (trigger signal of zero-return), SPD (speed/position changeover),
GS1~GS2 (STO inputs, safety related signals), 485 (Starting communication signal), PRG (executing EzSQ program), HLD
(retain output frequency), ROK (permission of run command), EB (rotation direction detection of B-phase), DISP (display lim-
itation), OP (option control signal), NO (no function)
Output signals
RUN (run signal), FA1~FA5 (frequency arrival signal), OL,OL2 (overload advance notice signal), OD (PID deviation error sig-
nal), AL (alarm signal), OTQ (over/under torque threshold), UV (under-voltage), TRQ (torque limit signal), RNT (run time ex-
pired), ONT (power ON time expired), THM (thermal warning), BRK (brake release), BER (brake error), ZS (0Hz detection),
DSE (speed deviation excessive), POK (positioning completion), ODc (analog voltage input disconnection), OIDc (analog
current input disconnection), FBV (PID second stage output), NDc (network disconnect detection), LOG1~LOG3 (Logic out-
put signals), WAC (capacitor life warning), WAF (cooling fan warning), FR (starting contact), OHF (heat sink overheat warn-
ing), LOC (Low load), MO1~MO3 (general outputs for EzSQ), IRDY (inverter ready), FWR (forward operation), RVR (reverse
operation), MJA (major failure), WCO (window comparator O), WCOI (window comparator OI), FREF (frequency command
source), REF (run command source), SETM (second motor in operation), EDM (STO (safe torque off) performance monitor),
OP (option control signal), NO (no function)
Standard functions
Free-V/f, manual/automatic torque boost, output voltage gain adjustment, AVR function, reduced voltage start, motor data
selection, auto-tuning, motor stabilization control, reverse running protection, simple position control, simple torque control,
torque limiting, automatic carrier frequency reduction, energy saving operation, PID function, non-stop operation at
instantaneous power failure, brake control, DC injection braking, dynamic braking (BRD), frequency upper and lower
limiters, jump frequencies, curve accel and decel (S, U, inversed U,EL-S), 16-stage speed profile, fine adjustment of start
frequency, accel and decel stop, process jogging, frequency calculation, frequency addition, 2-stage accel/decel, stop mode
selection, start/end freq., analog input filter, window comparators, input terminal response time, output signal delay/hold
function, rotation direction restriction, stop key selection, software lock, safe stop function, scaling function, display
restriction, password function, user parameter, initialization, initial display selection, cooling fan control, warning, trip retry,
frequency pull-in restart, frequency matching, overload restriction, over current restriction, DC bus voltage AVR
Analogue inputs
2 analogue inputs 0 to 10 V (10 KΩ), 4 to 20 mA (100 Ω)
Pulse train input terminal
0 to 10 V (up to 24 V), up to 32 kHz
Accel/Decel times
0.01 to 3600.0 s (line/curve selection), 2nd accel/decel setting available
Display
Status indicator LED’s Run, Program, Alarm, Power, Hz, Amps
Digital operator: Available to monitor 32 items: frequency reference, output current, output frequency...
Protection functions
Motor overload protection
Electronic Thermal overload relay and PTC thermistor input
Instantaneous overcurrent
200% of rated current
Overload
Dual rating:
Heavy duty (CT): 150% for 1 minute
Normal Duty (VT): 120% for 1 minute
Overvoltage
800 V for 400 V type and 400 V for 200 V type
Undervoltage
345 V for 400 V type and 172.5 V for 200 V type
Momentary power loss
Following items are selectable: Alarm, decelerates to stop, decelerates to stop with DC bus controlled, restart
Cooling fin overheat
Temperature monitor and error detection
Stall prevention level
Stall prevention during acceleration/deceleration and constant speed
Ground fault
Detection at power-on
Power charge indication
On when power is supplied to the control part
Ambient conditions
Degree of protection
IP20, Varnish coating on PCB
Ambient humidity
90% RH or less (without condensation)
Storage temperature
-20ºC..+65ºC (short-term temperature during transportation)
Ambient temperature
−10°C to 40°C
Installation
Indoor (no corrosive gas, dust, etc.)
Installation height
Max. 1000 m
Vibration
5.9 m/s
2
(0.6G), 10 to 55 Hz

 Loading...
Loading...











