3-18
3-1 Servo Drive Specifications
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
3
Specifications
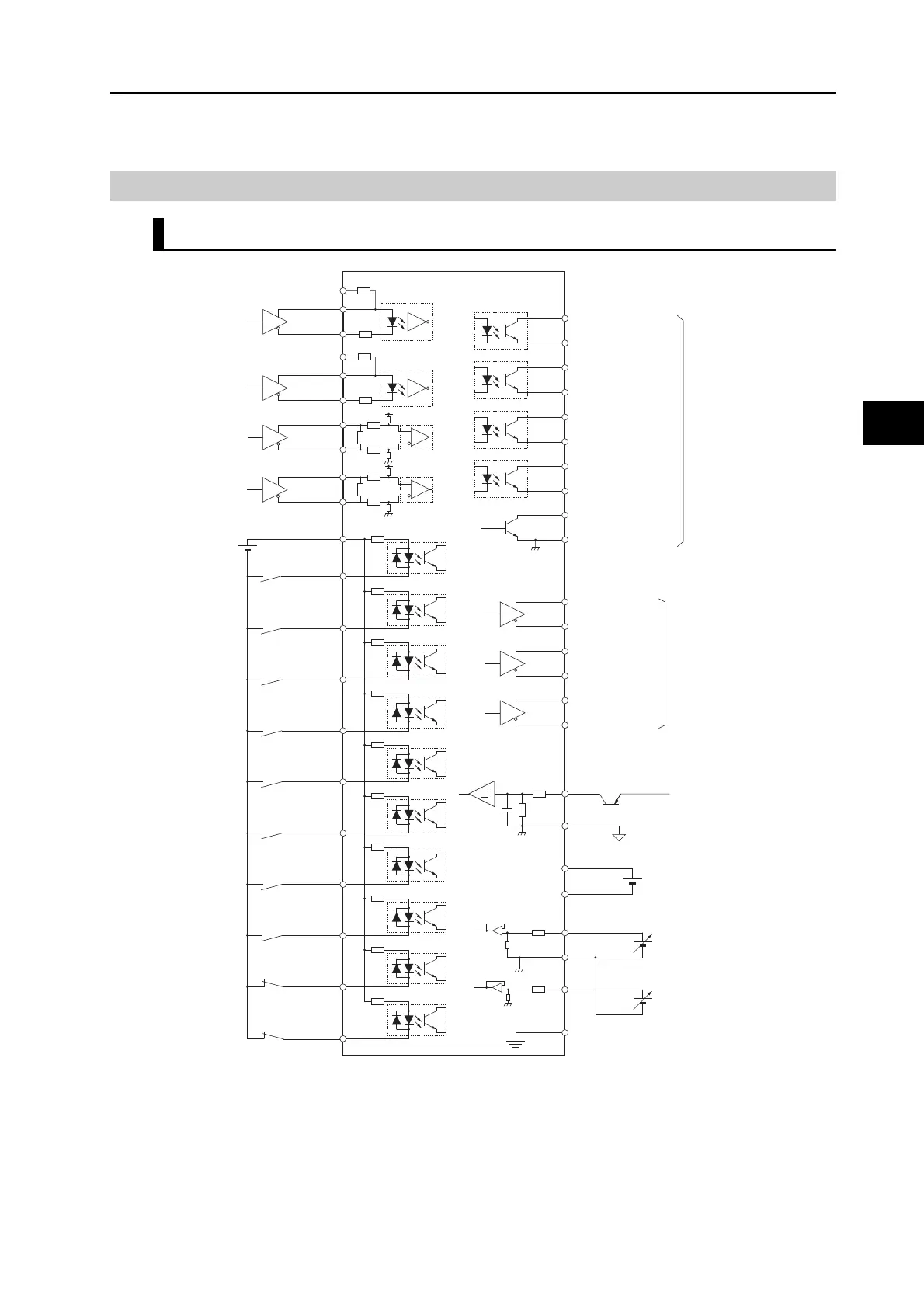
Control I/O Connector Specifications (CN1)
Control I/O Signal Connections and External Signal Processing for Position Control
*1. A cable equipped with a battery is not required if a backup battery is connected.
Note 1. The inputs of pins 8, 9 and 26 to 33, and outputs of pins 10, 11, 34, 35, 38 and 39, can be changed via parameter
settings.
Note 2. Pins 13, 20, 42 and 43 represent signals which are applicable when an absolute encoder is used.
Note 3. If pins 21, 22, 49, 48, 23, and 24 are used for the encoder output, use pin 25 (ZGND) to wire the ground.
Note 4. It is not necessary to wire input pins that are not being used.
2 kΩ
120 Ω
20 kΩ
2k Ω
220 Ω
5
2
6
Operation command
44
45
+CW
−CW
+CCW
−CCW
+CWLD
−CWLD
Reverse pulse
Forward pulse
BKIR
Brake interlock
Alarm output
BKIRCOM
11
10
READY
READYCOM
ALMCOM
35
34
/ALM 37
36
INPCOM
INP
39
38
32
TVSEL
31 RESET
30 ECRST
28 GESEL1
27
GSEL
26
DFSEL1
29 RUN
7 +24 VIN
Control mode
switching
Alarm reset
Error counter reset
Electronic gear
switching
Gain switching
Damping filter
switching
12 to 24 VDC
Maximum
service
voltage:
30 VDC
Maximum
output current:
50 mA DC
Reverse pulse
46
47
120 Ω
20 kΩ
33
IPG
Pulse prohibition
500 kpps max.
4 Mpps max.
8 NOT
Reverse drive
prohibition
9 POT
Forward drive
prohibition
ZGND
Z
Phase-Z output
(open-collector output)
18
10 k
Ω
3.83 kΩ
PCL
NCL
AGND2
Forward torque limit input
Reverse torque limit input
3.83 kΩ
16
17
10 k
Ω
19
25
Frame ground
FG
Shell
4.7 kΩ
4.7 kΩ
4.7 kΩ
4.7 kΩ
20 kΩ
2 kΩ
+CCWLD
−CCWLD
Forward pulse
+A
21
−A 22
+B 49
−B 48
+Z 23
−Z 24
Line-driver output
corresponding with
the EIA RS-422A
communications
method
(load resistance
120 Ω min.)
220 Ω
3
1
4
20 kΩ
2k Ω
4.7 kΩ
4.7 kΩ
4.7 kΩ
4.7 kΩ
4.7 kΩ
4.7 kΩ
+24 VCW
2.2 kΩ
+24 VCCW
2.2 kΩ
20
100Ω
4.7 kΩ
1 μF
SEN
SENGND
13
Sensor ON
BAT
BATGND
Backup battery
*1
42
43
Servo ready
completed output
Positioning
completion
output
Encoder
phase-A output
Encoder
phase-Z output
Encoder
phase-B output

 Loading...
Loading...




