5-5
5-1 Position Control
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
5
Basic Control Mode
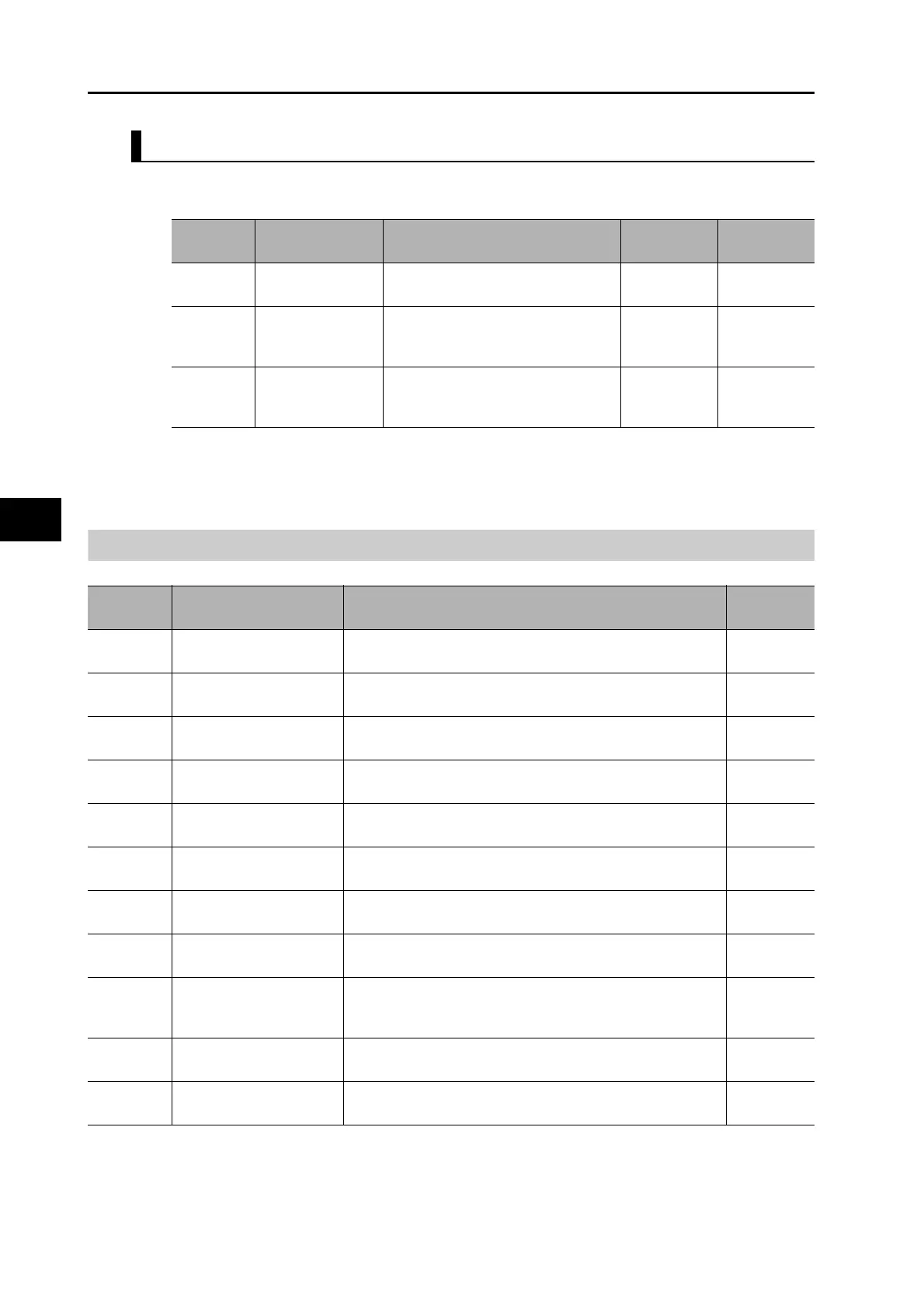
Electronic Gear Function (Pn008, Pn009, Pn010)
This function allows you to multiply the pulse command input from the host controller by the
specified gear ratio to determine the position command.
For details on the electronic gear function, refer to "6-4 Electronic Gear Function"(P.6-10).
Related Functions
Parameter
number
Parameter name Explanation
Setting
range
Unit
Pn008
Electronic Gear
Integer Setting
Set the number of command pulses
corresponding to 1 motor rotation.
0 to 2
20
Pulse
Pn009
Electronic Gear
Ratio Numerator 1
Set the numerator of the electronic
gear ratio for the command pulse
input.
0 to 2
30
−
Pn010
Electronic Gear
Ratio
Denominator
Set the denominator of the electronic
gear ratio for the command pulse
input.
1 to 2
30
−
Parameter
number
Parameter name Explanation Reference
Pn008
Electronic Gear Integer
Setting
Set the number of command pulses corresponding to 1
motor rotation.
P.8-5
Pn011
Encoder Dividing
Numerator
Set the pulse output resolution using the numbers of output
pulses per rotation for phase A and phase B, respectively.
P.8-6
Pn012
Encoder Output Direction
Switching Selection
Set the phase-B logic and output source for pulse output.
P.8-6
Pn222
Position Command Filter
Time Constant
Set the time constant of the first-order lag filter for the
position command.
P.8-23
Pn223
Smoothing Filter Time
Constant
Set the time constant of the FIR filter for the position
command.
P.8-24
Pn431
Positioning Completion
Range 1
Set the threshold of position error for output of the positioning
completion signal.
P.8-42
Pn432
Positioning Completion
Condition Selection
Select the condition under which the positioning completion
signal is output.
P.8-43
Pn433
Positioning Completion
Hold Time
Set the INP signal output time.
P.8-42
Pn503
Encoder Dividing
Denominator
You can set a dividing ratio by using Encoder Dividing
Numerator (Pn011) as the dividing numerator and Encoder
Dividing Denominator (Pn503) as the dividing denominator.
P.8-47
Pn517
Error Counter Reset
Condition Selection
Set the reset condition under which the error counter reset
input signal.
P.8-54
Pn518
Command Pulse
Prohibition Input Setting
Set whether to enable or disable the command pulse
prohibition input.
P.8-55

 Loading...
Loading...




