Motion sequence and axes Section 1-8
25
more information on the BASE command and the definition of the axis
sequence in an axis array, refer to the Trajexia Programming Manual,
chapter 3 (BASIC commands).
• If SERVO=OFF for one axis, the motion commands for that axis are
ignored.
• If the Following Error (FE) in one axis exceeds the parameter value
FELIMIT, the next action occurs:
- WDOG is set to OFF and all axes stop.
- SERVO for the axis that causes the error goes to OFF.
- The current move is cancelled and removed from the buffer.
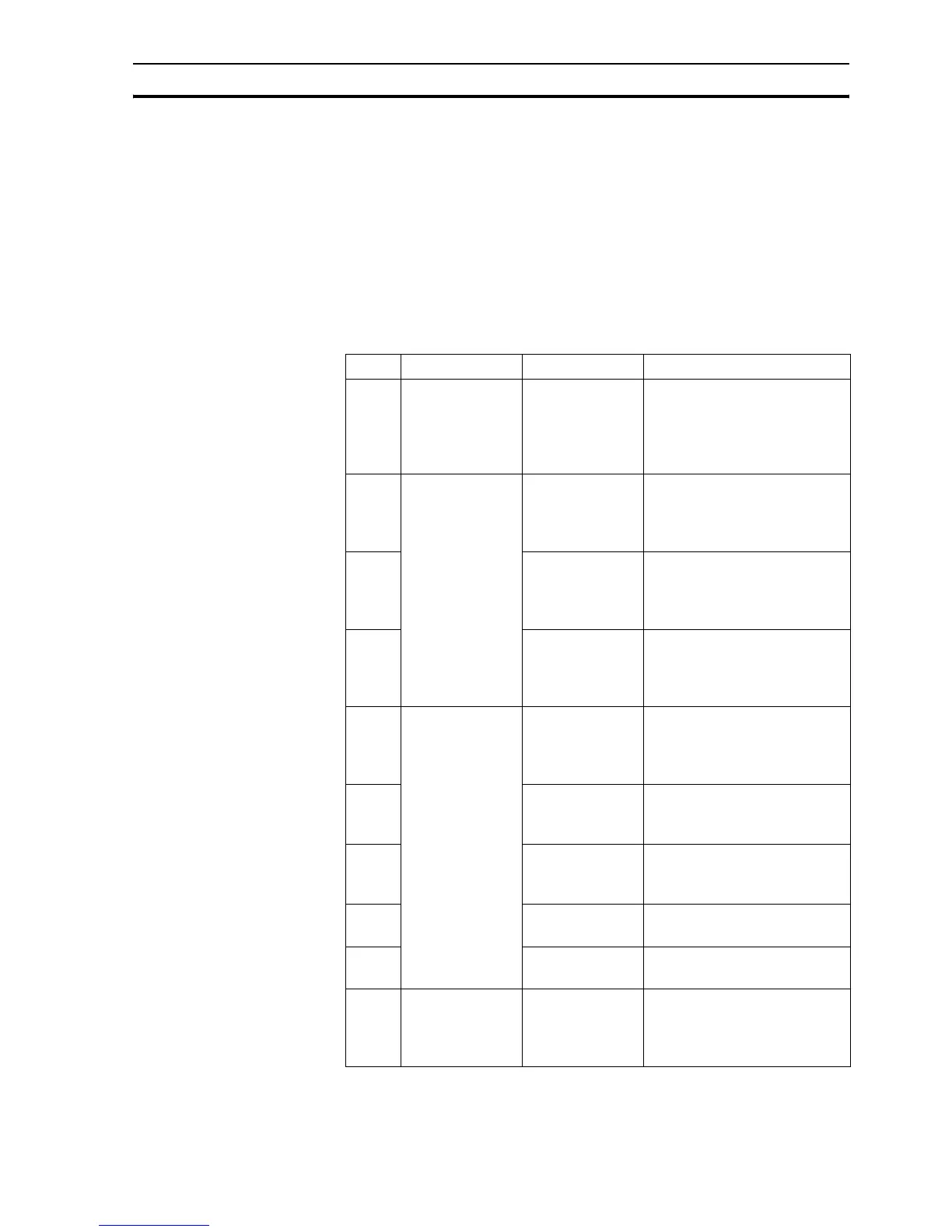
1-8-4 Type of axis
/i
ATYPE Applicable to Name Description
0 All axes Virtual axis Internal axis with no physical out-
put. It is the only valid setting for
non-allocated axes. That is, those
that are not MECHATROLINK-II
Servo Drivers.
40 MECHATROLINK-II
Servo Drivers
MECHATROLINK-II
Position (default)
Position loop in the Servo Driver.
CJ1W-MCH72 sends position ref-
erence to the Servo Driver via
MECHATROLINK-II.
41 MECHATROLINK-II
Speed
Position loop in the Trajexia.
CJ1W-MCH72 sends speed refer-
ence to the Servo Driver via
MECHATROLINK-II.
42 MECHATROLINK-II
Tor qu e
Position loop in the Trajexia.
CJ1W-MCH72 sends torque refer-
ence to the Servo Driver via
MECHATROLINK-II.
43 External driver con-
nected to encoder
input
Stepper output Pulse and direction outputs. Posi-
tion loop is in the driver. CJ1W-
MCH72 sends pulses and
receives no feed back.
44 Servo axis
(Default)
Encoder
CJ1W-MCH72 receives position
from an incremental encoder.
45 Encoder
output
The same as stepper, but with the
phase differential outputs emulat-
ing an incremental encoder.
47 Absolute EnDat Feedback is received from an
EnDat absolute encoder.
48 Absolute
SSI
Feedback is received from an SSI
absolute encoder.
49 MECHATROLINK-II
Inverters
Inverter as
axis
Inverters (with built-in encoder
interface) are controlled on the
MECHATROLINK-II bus as servo
axes.
 Loading...
Loading...









