Motion sequence and axes Section 1-8
26
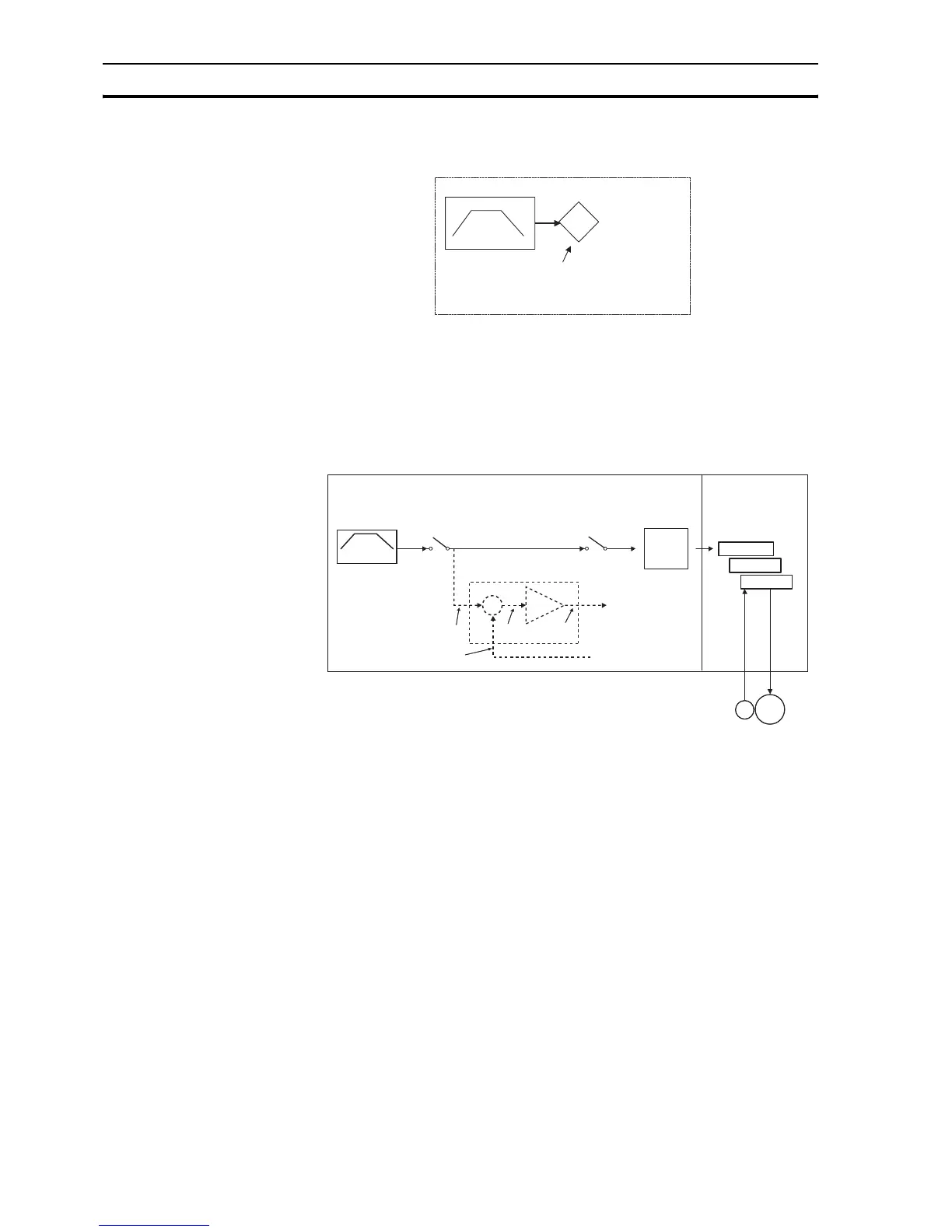
1-8-4-1 Virtual axis ATYPE=0
You can split a complex profile into two or more simple movements, each
assigned to a virtual axis. These movements can be added together with the
BASIC command ADDAX then assigned to a real axis.
1-8-4-2 MECHATROLINK-II position ATYPE=40
With SERVO = ON, the position loop is closed in the Servo Driver. Gain
settings in the CJ1W-MCH72 have no effect. The position reference is sent to
the Servo Driver.
Profile generator
MEASURED
POSITION
DEMAND
POSITION
=
Profile generator
M
E
CJ1W-MCH72
SERVO
+
_
SERVO = OFF SERVO = OFF
Position Loop is
deactivated
(Gains are not
used!)
ML-II
Position
command
Demanded
position
Measured
position
Position loop
Following
error
Speed
command
Position Loop
Speed Loop
Torque Loop
Note Although MPOS and FE are updated, the real value is the value in the Servo Driver.
The real Following Error can be monitored by the DRIVE_MONITOR parameter by set-
ting DRIVE_CONTROL = 2.
Note The MECHATROLINK-II position ATYPE = 40 is the recommended setting to obtain a
higher performance of the servo motor.
 Loading...
Loading...









