Motion sequence and axes Section 1-8
27
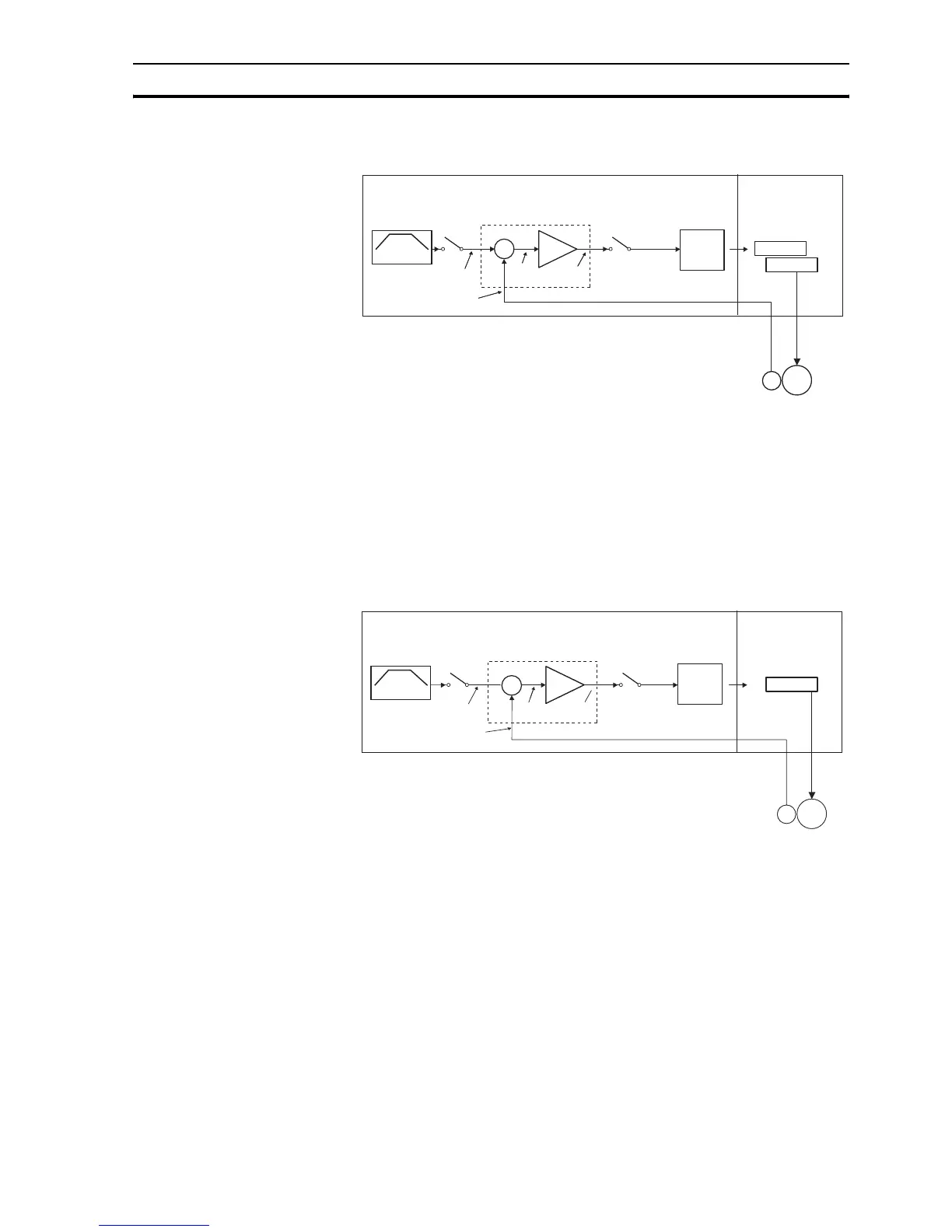
1-8-4-3 MECHATROLINK-II speed ATYPE=41
With SERVO = ON, the position loop is closed in the CJ1W-MCH72.
Speed reference is sent to the Servo Driver. For Mechatrolink Servo Drivers,
this axis type is not recommended, since there is one cycle delay in the loop
(DPOS(n) is compared with MPOS(n-1)).
With SERVO = OFF, the speed reference is sent via S_REF command.
0x40000000 means maximum speed of the servo motor. This is the
recommended setting.
1-8-4-4 MECHATROLINK-II torque ATYPE=42
With SERVO = ON, only the torque loop is closed in the Servo Driver. The
torque reference in the Servo Driver depends on the FE and the gain.
With SERVO = OFF, the torque reference is sent directly via the T_REF
command. 0x40000000 is the maximum torque of the servo motor.
SERVO
+
_
M
E
SERVO = OFF SERVO = OFF
CJ1W-MCH72
Position loop
Demanded
position
Measured
position
Profile generator
Following
error
Speed
command
ML-II
Speed
command
Speed Loop
Torque Loop
SERVO
+
_
M
E
SERVO = OFF SERVO = OFF
Position loop
Demanded
position
Measured
position
Profile generator
Following
error
CJ1W-MCH72
Torque Loop
ML-II
Torque
command
Torque
command
Note To monitor the torque in the servo in DRIVE_MONITOR, set DRIVE_CONTROL=11.
 Loading...
Loading...









