Categories Section 4-1
74
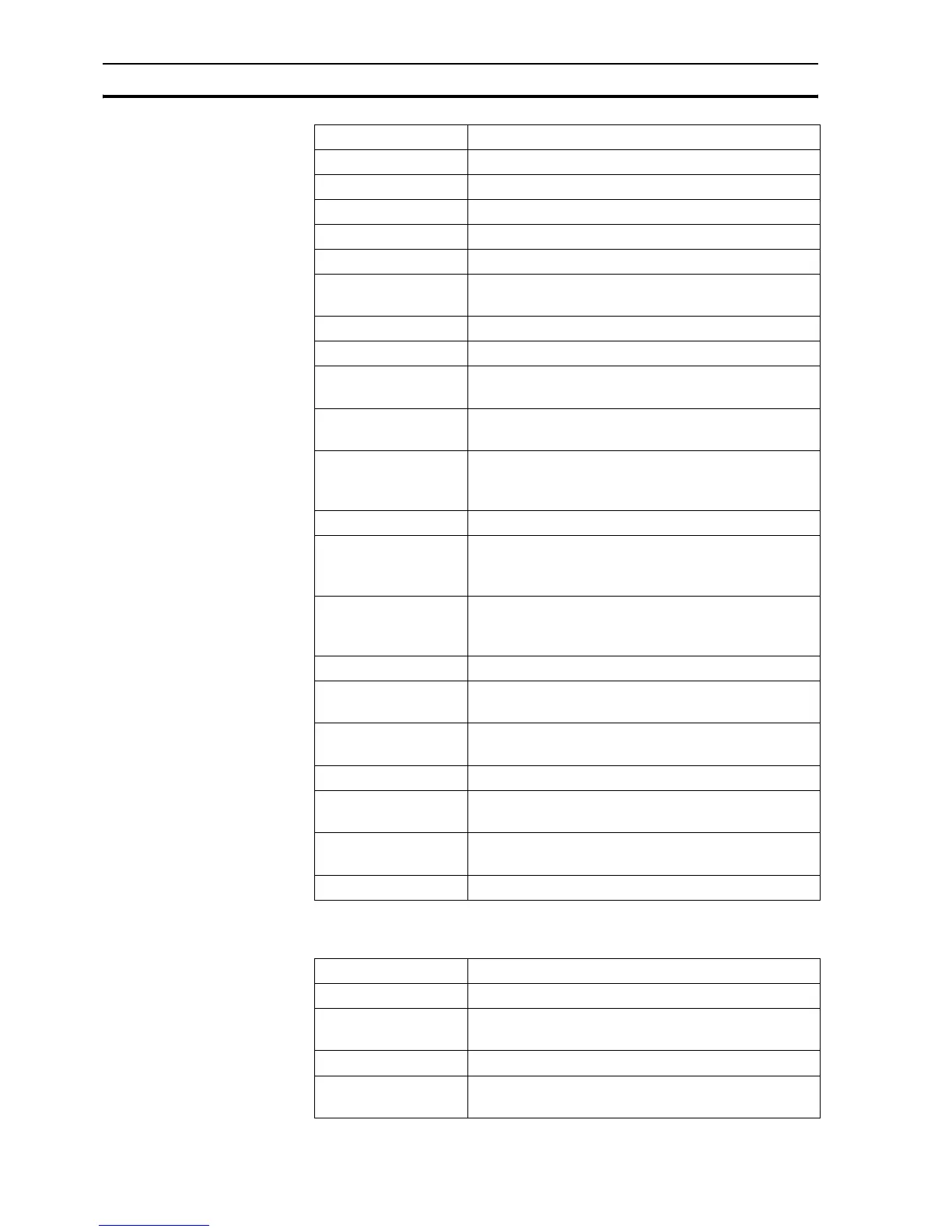
4-1-2 Axis parameters
/i
DISABLE_GROUP Groups axes together for error disabling.
DRIVE_ALARM Monitors the current alarm.
DRIVE_CLEAR Clears the alarm status of the Servo Driver.
DRIVE_READ Reads the specified parameter of the Servo Driver.
DRIVE_RESET Resets the Servo Driver.
DRIVE_WRITE Writes a specific value to the specified parameter of the
Servo Driver.
ENCODER_READ Reads a parameter of the EnDat absolute encoder.
ENCODER_WRITE Writes to a parameter of the EnDat absolute encoder.
FORWARD Moves an axis continuously forward at the speed set in the
SPEED parameter.
HW_PSWITCH Sets on and off the hardware switch on output 0 of the
Encoder Interface when predefined positions are reached.
MECHATROLINK Initializes MECHATROLINK-II bus and performs various
operations on MECHATROLINK-II stations connected to
the bus.
MHELICAL Interpolates 3 orthogonal axes in a helical move.
MOVE Moves one or more axes at the demand speed, accelera-
tion and deceleration to the position specified as increment
from the current position.
MOVEABS Moves one or more axes at the demand speed, accelera-
tion and deceleration to the position specified as absolute
position.
MOVECIRC Interpolates 2 orthogonal axes in a circular arc.
MOVELINK Creates a linear move on the base axis linked via a soft-
ware gearbox to the measured position of a link axis.
MOVEMODIFY Changes the absolute end position of the current single-
axis linear move (MOVE or MOVEABS).
RAPIDSTOP Cancels the current move on all axes.
REGIST Captures an axis position when a registration input or the Z
mark on the encoder is detected.
REVERSE Moves an axis continuously in reverse at the speed set in
the SPEED parameter.
STEP_RATIO Sets the ratio for the axis stepper output.
Name Description
Name Description
ACCEL Contains the axis acceleration rate.
ADDAX_AXIS Contains the number of the axis to which the base axis is
currently linked to by ADDAX.
ATYPE Contains the axis type.
AXIS_ENABLE Enables and disables particular axis independently of other
axis.
 Loading...
Loading...









