Categories Section 4-1
75
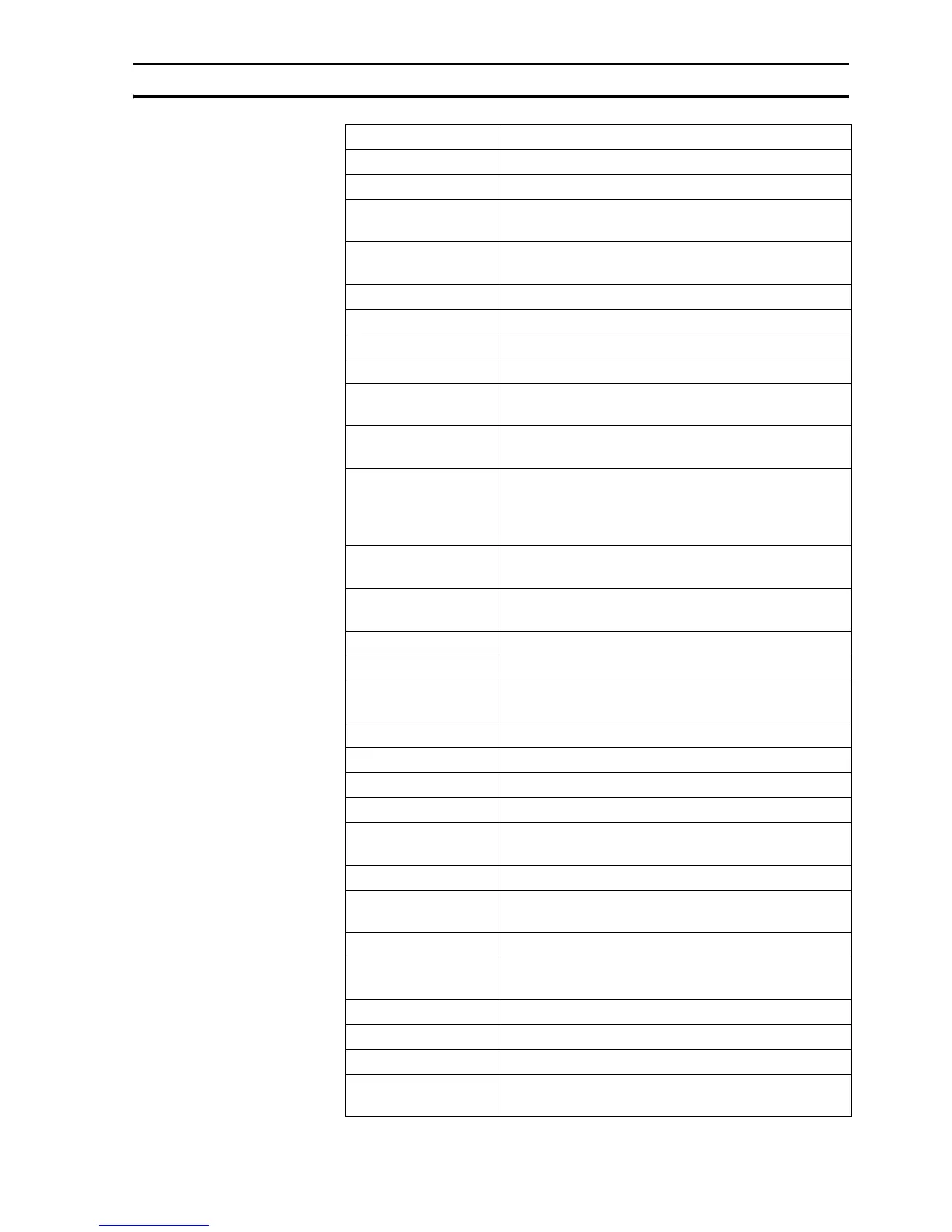
AXISSTATUS Contains the axis status.
BACKLASH_DIST Defines the amount of backlash compensation.
CLOSE_WIN Defines the end of the window in which a registration mark
is expected.
CLUTCH_RATE Defines the change in connection ratio when using the
CONNECT command.
CREEP Contains the creep speed.
D_GAIN Contains the derivative control gain.
DATUM_IN Contains the input number to be used as the origin input.
DECEL Contains the axis deceleration rate.
DEMAND_EDGES Contains the current value of the DPOS axis parameter in
encoder edges.
DPOS Contains the demand position generated by the move
commands.
DRIVE_CONTROL Selects data to be monitored using DRIVE_MONITOR for
axes connected via the MECHATROLINK-II bus. For axes
connected via the Encoder Interface, DRIVE_CONTROL
sets outputs of the Encoder Interface.
DRIVE_INPUTS Holds I/O data of the driver connected to MECHATRO-
LINK-II bus. Data is updated every servo cycle.
DRIVE_MONITOR Monitors data of the Servo Driver connected to MECHA-
TROLINK-II bus. Data are updated every servo cycle.
DRIVE_STATUS Contains the current status of the Servo Driver.
ENCODER Contains a raw copy of the encoder hardware register.
ENCODER_BITS Sets the number of bits for the absolute encoder con-
nected to the Encoder Interface.
ENCODER_CONTROL Controls operating mode of the EnDat absolute encoder.
ENCODER_RATIO Sets scaling value for incoming encoder counts.
ENCODER_TURNS Returns the multi-turn count of the absolute encoder.
ENDMOVE Holds the position of the end of the current move.
ERRORMASK Contains the mask value that determines if
MOTION_ERROR occurs depending on the axis status.
FAST_JOG Contains the input number to be used as the fast jog input.
FASTDEC Defines ramp to zero deceleration ratio when an axis limit
switch or position is reached.
FE Contains the Following Error.
FE_LATCH Contains the FE value which caused the axis to put con-
troller in MOTION_ERROR state.
FE_LIMIT Contains the maximum allowable Following Error.
FE_LIMIT_MODE Defines how FE influences MOTION_ERROR state.
FE_RANGE Contains the Following Error warning range limit.
FHOLD_IN Contains the input number to be used as the feedhold
input.
Name Description
 Loading...
Loading...









